Welcome to the Yocto Project! The Yocto Project is an open-source collaboration project focused on embedded Linux developers. Amongst other things, the Yocto Project uses the Poky build system to construct complete Linux images.
This short document will give you some basic information about the environment as well as let you experience it in its simplest form. After reading this document, you will have a basic understanding of what the Yocto Project is and how to use some of its core components. This document steps you through a simple example showing you how to build a small image and run it using the QEMU emulator.
For complete information on the Yocto Project, you should check out the Yocto Project Website. Through the website, you can find the latest builds, breaking news, full development documentation, and a rich Yocto Project Development Community into which you can tap.
Finally, you might find the Frequently Asked Questions (FAQ) for the Yocto Project at Yocto Project FAQ and the FAQ appendix located in The Yocto Project Reference Manual helpful.
Note
Due to production processes, there could be differences between the Yocto Project documentation bundled in the release tarball and the Yocto Project Quick Start on the Yocto Project website. For the latest version of this manual, see the manual on the website.The Yocto Project through the Poky build system provides an open source development environment targeting the ARM, MIPS, PowerPC and x86 architectures for a variety of platforms including x86-64 and emulated ones. You can use components from the Yocto Project to design, develop, build, debug, simulate, and test the complete software stack using Linux, the X Window System, GNOME Mobile-based application frameworks, and Qt frameworks.
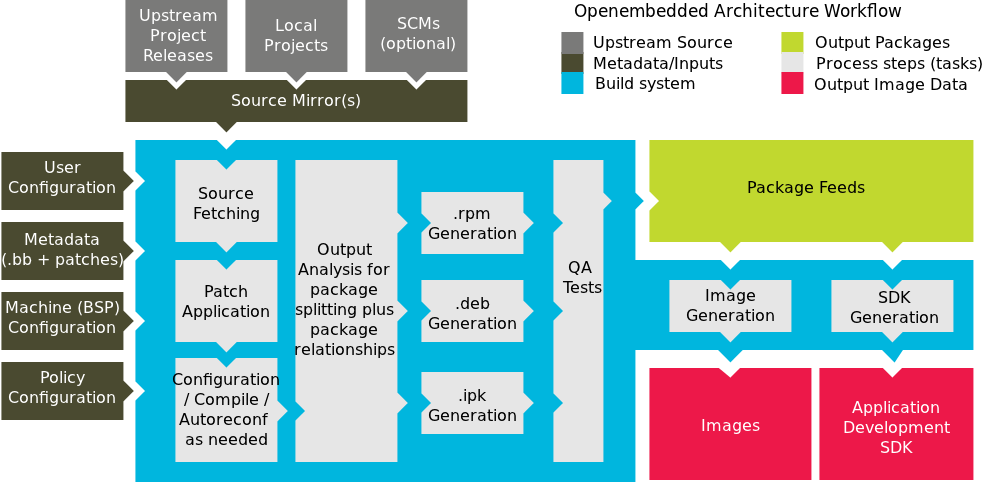 |
The Yocto Project Development Environment
Here are some highlights for the Yocto Project:
Provides a recent Linux kernel along with a set of system commands and libraries suitable for the embedded environment.
Makes available system components such as X11, Matchbox, GTK+, Pimlico, Clutter, GuPNP and Qt (among others) so you can create a richer user interface experience on devices that use displays or have a GUI. For devices that don't have a GUI or display, you simply would not employ these components.
Creates a focused and stable core compatible with the OpenEmbedded project with which you can easily and reliably build and develop.
Fully supports a wide range of hardware and device emulation through the QEMU Emulator.
The Yocto Project can generate images for many kinds of devices. However, the standard example machines target QEMU full-system emulation for x86, x86-64, ARM, MIPS, and PPC-based architectures as well as specific hardware such as the Intel® Desktop Board DH55TC. Because an image developed with the Yocto Project can boot inside a QEMU emulator, the development environment works nicely as a test platform for developing embedded software.
Another important Yocto Project feature is the Sato reference User Interface. This optional GNOME mobile-based UI, which is intended for devices with restricted screen sizes, sits neatly on top of a device using the GNOME Mobile Stack and provides a well-defined user experience. Implemented in its own layer, it makes it clear to developers how they can implement their own user interface on top of Yocto Linux.
You need these things to develop in the Yocto Project environment:
A host system running a supported Linux distribution (i.e. recent releases of Fedora, openSUSE, Debian, and Ubuntu). If the host system supports multiple cores and threads, you can configure the Yocto Project build system to decrease the time needed to build images significantly.
The right packages.
A release of Yocto Project.
The Yocto Project team is continually verifying more and more Linux distributions with each release. In general, if you have the current release minus one of the following distributions you should have no problems.
Ubuntu
Fedora
openSUSE
For a list of the distributions under validation and their status, see the Distribution Support wiki page.
Note
For notes about using the Yocto Project on a RHEL 4-based host, see the BuildingOnRHEL4 wiki page.
The build system should be able to run on any modern distribution with Python 2.6 or 2.7. Earlier releases of Python are known to not work and the system does not support Python 3 at this time. This document assumes you are running one of the previously noted distributions on your Linux-based host systems.
Note
If you attempt to use a distribution not in the above list, you may or may not have success - you are venturing into untested territory. Refer to OE and Your Distro and Required Software for information for other distributions used with the OpenEmbedded project, which might be a starting point for exploration. If you go down this path, you should expect problems. When you do, please go to Yocto Project Bugzilla and submit a bug. We are interested in hearing about your experience.
Packages and package installation vary depending on your development system. In general, you need to have root access and then install the required packages. The next few sections show you how to get set up with the right packages for Ubuntu, Fedora, and openSUSE.
If your distribution is Ubuntu, you need to be running the bash shell. You can be sure you are running this shell by entering the following command and selecting "No" at the prompt:
$ sudo dpkg-reconfigure dash
The packages you need for a supported Ubuntu distribution are shown in the following command:
$ sudo apt-get install sed wget cvs subversion git-core coreutils \
unzip texi2html texinfo libsdl1.2-dev docbook-utils gawk \
python-pysqlite2 diffstat help2man make gcc build-essential \
g++ desktop-file-utils chrpath libgl1-mesa-dev libglu1-mesa-dev \
mercurial autoconf automake groff libtool xterm
The packages you need for a supported Fedora distribution are shown in the following commands:
$ sudo yum groupinstall "development tools"
$ sudo yum install python m4 make wget curl ftp hg tar bzip2 gzip \
unzip python-psyco perl texinfo texi2html diffstat openjade \
docbook-style-dsssl sed docbook-style-xsl docbook-dtds \
docbook-utils sed bc eglibc-devel ccache pcre pcre-devel quilt \
groff linuxdoc-tools patch linuxdoc-tools cmake help2man \
perl-ExtUtils-MakeMaker tcl-devel gettext chrpath ncurses apr \
SDL-devel mesa-libGL-devel mesa-libGLU-devel gnome-doc-utils \
autoconf automake libtool xterm
Note
If you are using a Fedora version prior to version 15, you will need to take some
extra steps to enable sudo, or you will need to run
the commands as root user.
See the Configuring Sudo
wiki page for details.
You can download the latest Yocto Project release by going to the Yocto Project Download page. Just go to the page and click the "Yocto Downloads" link found in the "Download" navigation pane to the right to view all available Yocto Project releases. Then, click the "Yocto Release" link for the release you want from the list to begin the download. Nightly and developmental builds are also maintained at http://autobuilder.yoctoproject.org/nightly/. However, for this document a released version of Yocto Project is used.
You can also get the Yocto Project files by setting up a Git repository on your host development system. Doing so allows you to contribute back to the project. For information on how to get set up using this method, see the "Yocto Project Release" item in The Yocto Project Development Manual.
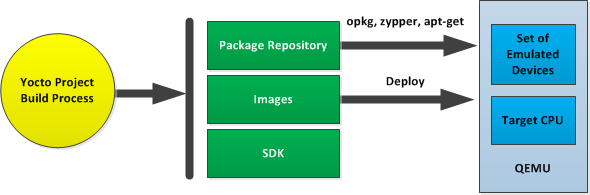
Now that you have your system requirements in order, you can give Yocto Project a try. This section presents some steps that let you do the following:
Build an image and run it in the QEMU emulator
Use a pre-built image and run it in the QEMU emulator
In the development environment you will need to build an image whenever you change hardware support, add or change system libraries, or add or change services that have dependencies.
Building an Image
Use the following commands to build your image. The build process creates an entire Linux distribution, including the toolchain, from source.
Note
The build process using Sato currently consumes about 50GB of disk space. To allow for variations in the build process and for future package expansion, we recommend having at least 100GB of free disk space.
Note
By default, the Yocto Project searches for source code using a pre-determined order through a set of locations. If you encounter problems with the Yocto Project finding and downloading source code, see the FAQ entry "How does Poky obtain source code and will it work behind my firewall or proxy server?" in The Yocto Project Reference Manual.
$ wget http://downloads.yoctoproject.org/releases/yocto/yocto-1.1/poky-edison-6.0.tar.bz2
$ tar xjf poky-edison-6.0.tar.bz2
$ source poky-edison-6.0/oe-init-build-env edison-6.0-build
Tip
To help conserve disk space during builds, you can add the following statement
to your project's configuration file, which for this example
is edison-6.0-build/conf/local.conf.
Adding this statement deletes the work directory used for building a package
once the package is built.
INHERIT += rm_work
In the previous example, the first command retrieves the Yocto Project release tarball from the source repositories using the
wgetcommand. Alternatively, you can go to the Yocto Project website Downloads page to retrieve the tarball.The second command extracts the files from the tarball and places them into a directory named
poky-edison-6.0in the current directory.The third command runs the Yocto Project environment setup script. Running this script defines Yocto Project build environment settings needed to complete the build. The script also creates the Yocto Project build directory, which is
edison-6.0-buildin this case. After the script runs, your current working directory is set to the build directory. Later, when the build completes, the build directory contains all the files created during the build.
Take some time to examine your local.conf file
in your project's configuration directory.
The defaults in that file should work fine.
However, there are some variables of interest at which you might look.
By default, the target architecture for the build is qemux86,
which produces an image that can be used in the QEMU emulator and is targeted at an
Intel® 32-bit based architecture.
To change this default, edit the value of the MACHINE variable
in the configuration file before launching the build.
Another couple of variables of interest are the
BB_NUMBER_THREADS and the
PARALLEL_MAKE variables.
By default, these variables are commented out.
However, if you have a multi-core CPU you might want to uncomment
the lines and set the variable
BB_NUMBER_THREADS equal to twice the number of your
host's processor cores.
Also, you could set the variable PARALLEL_MAKE equal to
1.5 times the number of processor cores.
Setting these variables can significantly shorten your build time.
Another consideration before you build is the package manager used when creating
the image.
By default, the Yocto Project build system uses the RPM package manager.
You can control this configuration by using the
PACKAGE_CLASSESpackage*.bbclass" in
The Yocto Project Reference Manual.
Continue with the following command to build an OS image for the target, which is
core-image-sato in this example.
For information on the -k option use the
bitbake --help command or see the
"BitBake" section in
The Yocto Project Reference Manual.
$ bitbake -k core-image-sato
Note
BitBake requires Python 2.6 or 2.7. For more information on this requirement, see the FAQ appendix in The Yocto Project Reference Manual.
The final command runs the image:
$ runqemu qemux86
Note
Depending on the number of processors and cores, the amount or RAM, the speed of your Internet connection and other factors, the build process could take several hours the first time you run it. Subsequent builds run much faster since parts of the build are cached.
If hardware, libraries and services are stable, you can get started by using a pre-built binary of the filesystem image, kernel, and toolchain and run it using the QEMU emulator. This scenario is useful for developing application software.
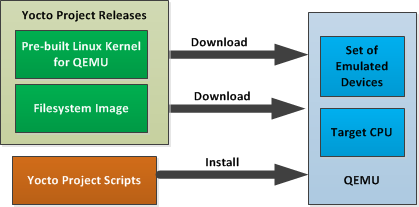
Using a Pre-Built Image
For this scenario, you need to do several things:
Install the stand-alone Yocto toolchain tarball.
Download the pre-built image that will boot with QEMU. You need to be sure to get the QEMU image that matches your target machine’s architecture (e.g. x86, ARM, etc.).
Download the filesystem image for your target machine's architecture.
Set up the environment to emulate the hardware and then start the QEMU emulator.
You can download the pre-built toolchain, which includes the runqemu
script and support files, from the appropriate directory under
http://downloads.yoctoproject.org/releases/yocto/yocto-1.1/toolchain/.
Toolchains are available for 32-bit and 64-bit development systems from the
i686 and x86_64 directories, respectively.
Each type of development system supports five target architectures.
The tarball files are named such that a string representing the host system appears
first in the filename and then is immediately followed by a string representing
the target architecture.
poky-eglibc<host_system>-<arch>-toolchain-gmae-<release>.tar.bz2
Where:
<host_system> is a string representing your development system:
i686 or x86_64.
<arch> is a string representing the target architecture:
i586, x86_64, powerpc, mips, or arm.
<release> is the version of Yocto Project.
For example, the following toolchain tarball is for a 64-bit development host system and a 32-bit target architecture:
poky-eglibc-x86_64-i586-toolchain-gmae-1.1.tar.bz2
The toolchain tarballs are self-contained and must be installed into /opt/poky.
The following commands show how you install the toolchain tarball given a 64-bit development host system
and a 32-bit target architecture.
The example assumes the toolchain tarball is located in ~/toolchains/:
$ cd /
$ sudo tar -xvjf ~/toolchains/poky-eglibc-x86_64-i586-toolchain-gmae-1.1.tar.bz2
For more information on how to install tarballs, see the "Using a Cross-Toolchain Tarball" and "Using BitBake and the Yocto Project Build Tree" sections in The Yocto Project Application Development Toolkit (ADT) User's Guide.
You can download the pre-built Linux kernel suitable for running in the QEMU emulator from
http://downloads.yoctoproject.org/releases/yocto/yocto-1.1/machines/qemu.
Be sure to use the kernel that matches the architecture you want to simulate.
Download areas exist for the five supported machine architectures:
qemuarm, qemumips, qemuppc,
qemux86, and qemux86_64.
Most kernel files have one of the following forms:
*zImage-qemu<arch>.bin
vmlinux-qemu<arch>.bin
Where:
<arch> is a string representing the target architecture:
x86, x86-64, ppc, mips, or arm.
You can learn more about downloading a Yocto Project kernel in the "Linux Yocto Kernel" section of The Yocto Project Development Manual.
You can also download the filesystem image suitable for your target architecture from http://downloads.yoctoproject.org/releases/yocto/yocto-1.1/machines/qemu. Again, be sure to use the filesystem that matches the architecture you want to simulate.
The filesystem image has two tarball forms: ext3 and
tar.
You must use the ext3 form when booting an image using the
QEMU emulator.
The tar form can be flattened out in your host development system
and used for Yocto Project build purposes.
core-image-<profile>-qemu<arch>.ext3
core-image-<profile>-qemu<arch>.tar.bz2
Where:
<profile> is the filesystem image's profile:
lsb, lsb-dev, lsb-sdk, lsb-qt3, minimal, minimal-dev, sato, sato-dev, or sato-sdk.
For information on these types of image profiles, see
Reference: Images in the Yocto Project Reference Manual.
<arch> is a string representing the target architecture:
x86, x86-64, ppc, mips, or arm.
Before you start the QEMU emulator, you need to set up the emulation environment. The following command form sets up the emulation environment.
$ source /opt/poky/1.1/environment-setup-<arch>-poky-linux-<if>
Where:
<arch> is a string representing the target architecture:
i586, x86_64, ppc603e, mips, or armv5te.
<if> is a string representing an embedded application binary interface.
Not all setup scripts include this string.
Finally, this command form invokes the QEMU emulator
$ runqemu <qemuarch> <kernel-image> <filesystem-image>
Where:
<qemuarch> is a string representing the target architecture: qemux86, qemux86-64,
qemuppc, qemumips, or qemuarm.
<kernel-image> is the architecture-specific kernel image.
<filesystem-image> is the .ext3 filesystem image.
Continuing with the example, the following two commands setup the emulation environment and launch QEMU. This example assumes the root filesystem tarball has been downloaded and expanded, and that the kernel and filesystem are for a 32-bit target architecture.
$ source /opt/poky/1.1/environment-setup-i686-poky-linux
$ runqemu qemux86 bzImage-3.0-qemux86-1.1.bin \
core-image-sato-qemux86.ext3
The environment in which QEMU launches varies depending on the filesystem image and on the target architecture. For example, if you source the environment for the ARM target architecture and then boot the minimal QEMU image, the emulator comes up in a new shell in command-line mode. However, if you boot the SDK image, QEMU comes up with a GUI.
Note
Booting the PPC image results in QEMU launching in the same shell in command-line mode.