3 Common Tasks
This chapter describes fundamental procedures such as creating layers, adding new software packages, extending or customizing images, porting work to new hardware (adding a new machine), and so forth. You will find that the procedures documented here occur often in the development cycle using the Yocto Project.
3.1 Understanding and Creating Layers
The OpenEmbedded build system supports organizing Metadata into multiple layers. Layers allow you to isolate different types of customizations from each other. For introductory information on the Yocto Project Layer Model, see the “The Yocto Project Layer Model” section in the Yocto Project Overview and Concepts Manual.
3.1.1 Creating Your Own Layer
It is very easy to create your own layers to use with the OpenEmbedded build system. The Yocto Project ships with tools that speed up creating layers. This section describes the steps you perform by hand to create layers so that you can better understand them. For information about the layer-creation tools, see the “Creating a new BSP Layer Using the bitbake-layers Script” section in the Yocto Project Board Support Package (BSP) Developer’s Guide and the “Creating a General Layer Using the bitbake-layers Script” section further down in this manual.
Follow these general steps to create your layer without using tools:
Check Existing Layers: Before creating a new layer, you should be sure someone has not already created a layer containing the Metadata you need. You can see the OpenEmbedded Metadata Index for a list of layers from the OpenEmbedded community that can be used in the Yocto Project. You could find a layer that is identical or close to what you need.
Create a Directory: Create the directory for your layer. When you create the layer, be sure to create the directory in an area not associated with the Yocto Project Source Directory (e.g. the cloned
pokyrepository).While not strictly required, prepend the name of the directory with the string “meta-”. For example:
meta-mylayer meta-GUI_xyz meta-mymachine
With rare exceptions, a layer’s name follows this form:
meta-root_name
Following this layer naming convention can save you trouble later when tools, components, or variables “assume” your layer name begins with “meta-”. A notable example is in configuration files as shown in the following step where layer names without the “meta-” string are appended to several variables used in the configuration.
Create a Layer Configuration File: Inside your new layer folder, you need to create a
conf/layer.conffile. It is easiest to take an existing layer configuration file and copy that to your layer’sconfdirectory and then modify the file as needed.The
meta-yocto-bsp/conf/layer.conffile in the Yocto Project Source Repositories demonstrates the required syntax. For your layer, you need to replace “yoctobsp” with a unique identifier for your layer (e.g. “machinexyz” for a layer named “meta-machinexyz”):# We have a conf and classes directory, add to BBPATH BBPATH .= ":${LAYERDIR}" # We have recipes-* directories, add to BBFILES BBFILES += "${LAYERDIR}/recipes-*/*/*.bb \ ${LAYERDIR}/recipes-*/*/*.bbappend" BBFILE_COLLECTIONS += "yoctobsp" BBFILE_PATTERN_yoctobsp = "^${LAYERDIR}/" BBFILE_PRIORITY_yoctobsp = "5" LAYERVERSION_yoctobsp = "4" LAYERSERIES_COMPAT_yoctobsp = "dunfell"
Following is an explanation of the layer configuration file:
BBPATH: Adds the layer’s root directory to BitBake’s search path. Through the use of the
BBPATHvariable, BitBake locates class files (.bbclass), configuration files, and files that are included withincludeandrequirestatements. For these cases, BitBake uses the first file that matches the name found inBBPATH. This is similar to the way thePATHvariable is used for binaries. It is recommended, therefore, that you use unique class and configuration filenames in your custom layer.BBFILES: Defines the location for all recipes in the layer.
BBFILE_COLLECTIONS: Establishes the current layer through a unique identifier that is used throughout the OpenEmbedded build system to refer to the layer. In this example, the identifier “yoctobsp” is the representation for the container layer named “meta-yocto-bsp”.
BBFILE_PATTERN: Expands immediately during parsing to provide the directory of the layer.
BBFILE_PRIORITY: Establishes a priority to use for recipes in the layer when the OpenEmbedded build finds recipes of the same name in different layers.
LAYERVERSION: Establishes a version number for the layer. You can use this version number to specify this exact version of the layer as a dependency when using the LAYERDEPENDS variable.
LAYERDEPENDS: Lists all layers on which this layer depends (if any).
LAYERSERIES_COMPAT: Lists the Yocto Project releases for which the current version is compatible. This variable is a good way to indicate if your particular layer is current.
Add Content: Depending on the type of layer, add the content. If the layer adds support for a machine, add the machine configuration in a
conf/machine/file within the layer. If the layer adds distro policy, add the distro configuration in aconf/distro/file within the layer. If the layer introduces new recipes, put the recipes you need inrecipes-*subdirectories within the layer.Note
For an explanation of layer hierarchy that is compliant with the Yocto Project, see the “Example Filesystem Layout” section in the Yocto Project Board Support Package (BSP) Developer’s Guide.
Optionally Test for Compatibility: If you want permission to use the Yocto Project Compatibility logo with your layer or application that uses your layer, perform the steps to apply for compatibility. See the “Making Sure Your Layer is Compatible With Yocto Project” section for more information.
3.1.2 Following Best Practices When Creating Layers
To create layers that are easier to maintain and that will not impact builds for other machines, you should consider the information in the following list:
Avoid “Overlaying” Entire Recipes from Other Layers in Your Configuration: In other words, do not copy an entire recipe into your layer and then modify it. Rather, use an append file (
.bbappend) to override only those parts of the original recipe you need to modify.Avoid Duplicating Include Files: Use append files (
.bbappend) for each recipe that uses an include file. Or, if you are introducing a new recipe that requires the included file, use the path relative to the original layer directory to refer to the file. For example, userequire recipes-core/package/file.incinstead ofrequirefile.inc. If you’re finding you have to overlay the include file, it could indicate a deficiency in the include file in the layer to which it originally belongs. If this is the case, you should try to address that deficiency instead of overlaying the include file. For example, you could address this by getting the maintainer of the include file to add a variable or variables to make it easy to override the parts needing to be overridden.Structure Your Layers: Proper use of overrides within append files and placement of machine-specific files within your layer can ensure that a build is not using the wrong Metadata and negatively impacting a build for a different machine. Following are some examples:
Modify Variables to Support a Different Machine: Suppose you have a layer named
meta-onethat adds support for building machine “one”. To do so, you use an append file namedbase-files.bbappendand create a dependency on “foo” by altering the DEPENDS variable:DEPENDS = "foo"
The dependency is created during any build that includes the layer
meta-one. However, you might not want this dependency for all machines. For example, suppose you are building for machine “two” but yourbblayers.conffile has themeta-onelayer included. During the build, thebase-filesfor machine “two” will also have the dependency onfoo.To make sure your changes apply only when building machine “one”, use a machine override with the
DEPENDSstatement:DEPENDS_one = "foo"
You should follow the same strategy when using
_appendand_prependoperations:DEPENDS_append_one = " foo" DEPENDS_prepend_one = "foo "
As an actual example, here’s a snippet from the generic kernel include file
linux-yocto.inc, wherein the kernel compile and link options are adjusted in the case of a subset of the supported architectures:DEPENDS_append_aarch64 = " libgcc" KERNEL_CC_append_aarch64 = " ${TOOLCHAIN_OPTIONS}" KERNEL_LD_append_aarch64 = " ${TOOLCHAIN_OPTIONS}" DEPENDS_append_nios2 = " libgcc" KERNEL_CC_append_nios2 = " ${TOOLCHAIN_OPTIONS}" KERNEL_LD_append_nios2 = " ${TOOLCHAIN_OPTIONS}" DEPENDS_append_arc = " libgcc" KERNEL_CC_append_arc = " ${TOOLCHAIN_OPTIONS}" KERNEL_LD_append_arc = " ${TOOLCHAIN_OPTIONS}" KERNEL_FEATURES_append_qemuall=" features/debug/printk.scc"
Note
Avoiding “+=” and “=+” and using machine-specific
_appendand_prependoperations is recommended as well.Place Machine-Specific Files in Machine-Specific Locations: When you have a base recipe, such as
base-files.bb, that contains a SRC_URI statement to a file, you can use an append file to cause the build to use your own version of the file. For example, an append file in your layer atmeta-one/recipes-core/base-files/base-files.bbappendcould extend FILESPATH using FILESEXTRAPATHS as follows:FILESEXTRAPATHS_prepend := "${THISDIR}/${BPN}:"
The build for machine “one” will pick up your machine-specific file as long as you have the file in
meta-one/recipes-core/base-files/base-files/. However, if you are building for a different machine and thebblayers.conffile includes themeta-onelayer and the location of your machine-specific file is the first location where that file is found according toFILESPATH, builds for all machines will also use that machine-specific file.You can make sure that a machine-specific file is used for a particular machine by putting the file in a subdirectory specific to the machine. For example, rather than placing the file in
meta-one/recipes-core/base-files/base-files/as shown above, put it inmeta-one/recipes-core/base-files/base-files/one/. Not only does this make sure the file is used only when building for machine “one”, but the build process locates the file more quickly.In summary, you need to place all files referenced from
SRC_URIin a machine-specific subdirectory within the layer in order to restrict those files to machine-specific builds.
Perform Steps to Apply for Yocto Project Compatibility: If you want permission to use the Yocto Project Compatibility logo with your layer or application that uses your layer, perform the steps to apply for compatibility. See the “Making Sure Your Layer is Compatible With Yocto Project” section for more information.
Follow the Layer Naming Convention: Store custom layers in a Git repository that use the
meta-layer_nameformat.Group Your Layers Locally: Clone your repository alongside other cloned
metadirectories from the Source Directory.
3.1.3 Making Sure Your Layer is Compatible With Yocto Project
When you create a layer used with the Yocto Project, it is advantageous to make sure that the layer interacts well with existing Yocto Project layers (i.e. the layer is compatible with the Yocto Project). Ensuring compatibility makes the layer easy to be consumed by others in the Yocto Project community and could allow you permission to use the Yocto Project Compatible Logo.
Note
Only Yocto Project member organizations are permitted to use the Yocto Project Compatible Logo. The logo is not available for general use. For information on how to become a Yocto Project member organization, see the Yocto Project Website.
The Yocto Project Compatibility Program consists of a layer application process that requests permission to use the Yocto Project Compatibility Logo for your layer and application. The process consists of two parts:
Successfully passing a script (
yocto-check-layer) that when run against your layer, tests it against constraints based on experiences of how layers have worked in the real world and where pitfalls have been found. Getting a “PASS” result from the script is required for successful compatibility registration.Completion of an application acceptance form, which you can find at https://www.yoctoproject.org/webform/yocto-project-compatible-registration.
To be granted permission to use the logo, you need to satisfy the following:
Be able to check the box indicating that you got a “PASS” when running the script against your layer.
Answer “Yes” to the questions on the form or have an acceptable explanation for any questions answered “No”.
Be a Yocto Project Member Organization.
The remainder of this section presents information on the registration
form and on the yocto-check-layer script.
3.1.3.1 Yocto Project Compatible Program Application
Use the form to apply for your layer’s approval. Upon successful application, you can use the Yocto Project Compatibility Logo with your layer and the application that uses your layer.
To access the form, use this link: https://www.yoctoproject.org/webform/yocto-project-compatible-registration. Follow the instructions on the form to complete your application.
The application consists of the following sections:
Contact Information: Provide your contact information as the fields require. Along with your information, provide the released versions of the Yocto Project for which your layer is compatible.
Acceptance Criteria: Provide “Yes” or “No” answers for each of the items in the checklist. Space exists at the bottom of the form for any explanations for items for which you answered “No”.
Recommendations: Provide answers for the questions regarding Linux kernel use and build success.
3.1.3.2 yocto-check-layer Script
The yocto-check-layer script provides you a way to assess how
compatible your layer is with the Yocto Project. You should run this
script prior to using the form to apply for compatibility as described
in the previous section. You need to achieve a “PASS” result in order to
have your application form successfully processed.
The script divides tests into three areas: COMMON, BSP, and DISTRO. For example, given a distribution layer (DISTRO), the layer must pass both the COMMON and DISTRO related tests. Furthermore, if your layer is a BSP layer, the layer must pass the COMMON and BSP set of tests.
To execute the script, enter the following commands from your build directory:
$ source oe-init-build-env
$ yocto-check-layer your_layer_directory
Be sure to provide the actual directory for your layer as part of the command.
Entering the command causes the script to determine the type of layer and then to execute a set of specific tests against the layer. The following list overviews the test:
common.test_readme: Tests if aREADMEfile exists in the layer and the file is not empty.common.test_parse: Tests to make sure that BitBake can parse the files without error (i.e.bitbake -p).common.test_show_environment: Tests that the global or per-recipe environment is in order without errors (i.e.bitbake -e).common.test_world: Verifies thatbitbake worldworks.common.test_signatures: Tests to be sure that BSP and DISTRO layers do not come with recipes that change signatures.common.test_layerseries_compat: Verifies layer compatibility is set properly.bsp.test_bsp_defines_machines: Tests if a BSP layer has machine configurations.bsp.test_bsp_no_set_machine: Tests to ensure a BSP layer does not set the machine when the layer is added.bsp.test_machine_world: Verifies thatbitbake worldworks regardless of which machine is selected.bsp.test_machine_signatures: Verifies that building for a particular machine affects only the signature of tasks specific to that machine.distro.test_distro_defines_distros: Tests if a DISTRO layer has distro configurations.distro.test_distro_no_set_distros: Tests to ensure a DISTRO layer does not set the distribution when the layer is added.
3.1.4 Enabling Your Layer
Before the OpenEmbedded build system can use your new layer, you need to
enable it. To enable your layer, simply add your layer’s path to the
BBLAYERS variable in your conf/bblayers.conf file, which is
found in the Build Directory.
The following example shows how to enable a layer named
meta-mylayer:
# POKY_BBLAYERS_CONF_VERSION is increased each time build/conf/bblayers.conf
# changes incompatibly
POKY_BBLAYERS_CONF_VERSION = "2"
BBPATH = "${TOPDIR}"
BBFILES ?= ""
BBLAYERS ?= " \
/home/user/poky/meta \
/home/user/poky/meta-poky \
/home/user/poky/meta-yocto-bsp \
/home/user/poky/meta-mylayer \
"
BitBake parses each conf/layer.conf file from the top down as
specified in the BBLAYERS variable within the conf/bblayers.conf
file. During the processing of each conf/layer.conf file, BitBake
adds the recipes, classes and configurations contained within the
particular layer to the source directory.
3.1.5 Using .bbappend Files in Your Layer
A recipe that appends Metadata to another recipe is called a BitBake
append file. A BitBake append file uses the .bbappend file type
suffix, while the corresponding recipe to which Metadata is being
appended uses the .bb file type suffix.
You can use a .bbappend file in your layer to make additions or
changes to the content of another layer’s recipe without having to copy
the other layer’s recipe into your layer. Your .bbappend file
resides in your layer, while the main .bb recipe file to which you
are appending Metadata resides in a different layer.
Being able to append information to an existing recipe not only avoids duplication, but also automatically applies recipe changes from a different layer into your layer. If you were copying recipes, you would have to manually merge changes as they occur.
When you create an append file, you must use the same root name as the
corresponding recipe file. For example, the append file
someapp_3.1.bbappend must apply to someapp_3.1.bb. This
means the original recipe and append file names are version
number-specific. If the corresponding recipe is renamed to update to a
newer version, you must also rename and possibly update the
corresponding .bbappend as well. During the build process, BitBake
displays an error on starting if it detects a .bbappend file that
does not have a corresponding recipe with a matching name. See the
BB_DANGLINGAPPENDS_WARNONLY
variable for information on how to handle this error.
As an example, consider the main formfactor recipe and a corresponding
formfactor append file both from the Source Directory.
Here is the main
formfactor recipe, which is named formfactor_0.0.bb and located in
the “meta” layer at meta/recipes-bsp/formfactor:
SUMMARY = "Device formfactor information"
DESCRIPTION = "A formfactor configuration file provides information about the \
target hardware for which the image is being built and information that the \
build system cannot obtain from other sources such as the kernel."
SECTION = "base"
LICENSE = "MIT"
LIC_FILES_CHKSUM = "file://${COREBASE}/meta/COPYING.MIT;md5=3da9cfbcb788c80a0384361b4de20420"
PR = "r45"
SRC_URI = "file://config file://machconfig"
S = "${WORKDIR}"
PACKAGE_ARCH = "${MACHINE_ARCH}"
INHIBIT_DEFAULT_DEPS = "1"
do_install() {
# Install file only if it has contents
install -d ${D}${sysconfdir}/formfactor/
install -m 0644 ${S}/config ${D}${sysconfdir}/formfactor/
if [ -s "${S}/machconfig" ]; then
install -m 0644 ${S}/machconfig ${D}${sysconfdir}/formfactor/
fi
}
In the main recipe, note the SRC_URI variable, which tells the OpenEmbedded build system where to find files during the build.
Following is the append file, which is named formfactor_0.0.bbappend
and is from the Raspberry Pi BSP Layer named meta-raspberrypi. The
file is in the layer at recipes-bsp/formfactor:
FILESEXTRAPATHS_prepend := "${THISDIR}/${PN}:"
By default, the build system uses the
FILESPATH variable to
locate files. This append file extends the locations by setting the
FILESEXTRAPATHS
variable. Setting this variable in the .bbappend file is the most
reliable and recommended method for adding directories to the search
path used by the build system to find files.
The statement in this example extends the directories to include
${THISDIR}/${PN},
which resolves to a directory named formfactor in the same directory
in which the append file resides (i.e.
meta-raspberrypi/recipes-bsp/formfactor. This implies that you must
have the supporting directory structure set up that will contain any
files or patches you will be including from the layer.
Using the immediate expansion assignment operator := is important
because of the reference to THISDIR. The trailing colon character is
important as it ensures that items in the list remain colon-separated.
Note
BitBake automatically defines the THISDIR variable. You should
never set this variable yourself. Using “_prepend” as part of the
FILESEXTRAPATHS ensures your path will be searched prior to other
paths in the final list.
Also, not all append files add extra files. Many append files simply
exist to add build options (e.g. systemd). For these cases, your
append file would not even use the FILESEXTRAPATHS statement.
3.1.6 Prioritizing Your Layer
Each layer is assigned a priority value. Priority values control which
layer takes precedence if there are recipe files with the same name in
multiple layers. For these cases, the recipe file from the layer with a
higher priority number takes precedence. Priority values also affect the
order in which multiple .bbappend files for the same recipe are
applied. You can either specify the priority manually, or allow the
build system to calculate it based on the layer’s dependencies.
To specify the layer’s priority manually, use the BBFILE_PRIORITY variable and append the layer’s root name:
BBFILE_PRIORITY_mylayer = "1"
Note
It is possible for a recipe with a lower version number PV in a layer that has a higher priority to take precedence.
Also, the layer priority does not currently affect the precedence
order of .conf or .bbclass files. Future versions of BitBake
might address this.
3.1.7 Managing Layers
You can use the BitBake layer management tool bitbake-layers to
provide a view into the structure of recipes across a multi-layer
project. Being able to generate output that reports on configured layers
with their paths and priorities and on .bbappend files and their
applicable recipes can help to reveal potential problems.
For help on the BitBake layer management tool, use the following command:
$ bitbake-layers --help
NOTE: Starting bitbake server...
usage: bitbake-layers [-d] [-q] [-F] [--color COLOR] [-h] <subcommand> ...
BitBake layers utility
optional arguments:
-d, --debug Enable debug output
-q, --quiet Print only errors
-F, --force Force add without recipe parse verification
--color COLOR Colorize output (where COLOR is auto, always, never)
-h, --help show this help message and exit
subcommands:
<subcommand>
layerindex-fetch Fetches a layer from a layer index along with its
dependent layers, and adds them to conf/bblayers.conf.
layerindex-show-depends
Find layer dependencies from layer index.
add-layer Add one or more layers to bblayers.conf.
remove-layer Remove one or more layers from bblayers.conf.
flatten flatten layer configuration into a separate output
directory.
show-layers show current configured layers.
show-overlayed list overlayed recipes (where the same recipe exists
in another layer)
show-recipes list available recipes, showing the layer they are
provided by
show-appends list bbappend files and recipe files they apply to
show-cross-depends Show dependencies between recipes that cross layer
boundaries.
create-layer Create a basic layer
Use bitbake-layers <subcommand> --help to get help on a specific command
The following list describes the available commands:
help:Displays general help or help on a specified command.show-layers:Shows the current configured layers.show-overlayed:Lists overlayed recipes. A recipe is overlayed when a recipe with the same name exists in another layer that has a higher layer priority.show-recipes:Lists available recipes and the layers that provide them.show-appends:Lists.bbappendfiles and the recipe files to which they apply.show-cross-depends:Lists dependency relationships between recipes that cross layer boundaries.add-layer:Adds a layer tobblayers.conf.remove-layer:Removes a layer frombblayers.confflatten:Flattens the layer configuration into a separate output directory. Flattening your layer configuration builds a “flattened” directory that contains the contents of all layers, with any overlayed recipes removed and any.bbappendfiles appended to the corresponding recipes. You might have to perform some manual cleanup of the flattened layer as follows:Non-recipe files (such as patches) are overwritten. The flatten command shows a warning for these files.
Anything beyond the normal layer setup has been added to the
layer.conffile. Only the lowest priority layer’slayer.confis used.Overridden and appended items from
.bbappendfiles need to be cleaned up. The contents of each.bbappendend up in the flattened recipe. However, if there are appended or changed variable values, you need to tidy these up yourself. Consider the following example. Here, thebitbake-layerscommand adds the line#### bbappended ...so that you know where the following lines originate:... DESCRIPTION = "A useful utility" ... EXTRA_OECONF = "--enable-something" ... #### bbappended from meta-anotherlayer #### DESCRIPTION = "Customized utility" EXTRA_OECONF += "--enable-somethingelse"
Ideally, you would tidy up these utilities as follows:
... DESCRIPTION = "Customized utility" ... EXTRA_OECONF = "--enable-something --enable-somethingelse" ...
layerindex-fetch: Fetches a layer from a layer index, along with its dependent layers, and adds the layers to theconf/bblayers.conffile.layerindex-show-depends: Finds layer dependencies from the layer index.create-layer: Creates a basic layer.
3.1.8 Creating a General Layer Using the bitbake-layers Script
The bitbake-layers script with the create-layer subcommand
simplifies creating a new general layer.
Note
For information on BSP layers, see the “BSP Layers” section in the Yocto Project Board Specific (BSP) Developer’s Guide.
In order to use a layer with the OpenEmbedded build system, you need to add the layer to your
bblayers.confconfiguration file. See the “Adding a Layer Using the bitbake-layers Script” section for more information.
The default mode of the script’s operation with this subcommand is to create a layer with the following:
A layer priority of 6.
A
confsubdirectory that contains alayer.conffile.A
recipes-examplesubdirectory that contains a further subdirectory namedexample, which contains anexample.bbrecipe file.A
COPYING.MIT, which is the license statement for the layer. The script assumes you want to use the MIT license, which is typical for most layers, for the contents of the layer itself.A
READMEfile, which is a file describing the contents of your new layer.
In its simplest form, you can use the following command form to create a layer. The command creates a layer whose name corresponds to “your_layer_name” in the current directory:
$ bitbake-layers create-layer your_layer_name
As an example, the following command creates a layer named meta-scottrif
in your home directory:
$ cd /usr/home
$ bitbake-layers create-layer meta-scottrif
NOTE: Starting bitbake server...
Add your new layer with 'bitbake-layers add-layer meta-scottrif'
If you want to set the priority of the layer to other than the default
value of “6”, you can either use the --priority option or you
can edit the
BBFILE_PRIORITY value
in the conf/layer.conf after the script creates it. Furthermore, if
you want to give the example recipe file some name other than the
default, you can use the --example-recipe-name option.
The easiest way to see how the bitbake-layers create-layer command
works is to experiment with the script. You can also read the usage
information by entering the following:
$ bitbake-layers create-layer --help
NOTE: Starting bitbake server...
usage: bitbake-layers create-layer [-h] [--priority PRIORITY]
[--example-recipe-name EXAMPLERECIPE]
layerdir
Create a basic layer
positional arguments:
layerdir Layer directory to create
optional arguments:
-h, --help show this help message and exit
--priority PRIORITY, -p PRIORITY
Layer directory to create
--example-recipe-name EXAMPLERECIPE, -e EXAMPLERECIPE
Filename of the example recipe
3.1.9 Adding a Layer Using the bitbake-layers Script
Once you create your general layer, you must add it to your
bblayers.conf file. Adding the layer to this configuration file
makes the OpenEmbedded build system aware of your layer so that it can
search it for metadata.
Add your layer by using the bitbake-layers add-layer command:
$ bitbake-layers add-layer your_layer_name
Here is an example that adds a
layer named meta-scottrif to the configuration file. Following the
command that adds the layer is another bitbake-layers command that
shows the layers that are in your bblayers.conf file:
$ bitbake-layers add-layer meta-scottrif
NOTE: Starting bitbake server...
Parsing recipes: 100% |##########################################################| Time: 0:00:49
Parsing of 1441 .bb files complete (0 cached, 1441 parsed). 2055 targets, 56 skipped, 0 masked, 0 errors.
$ bitbake-layers show-layers
NOTE: Starting bitbake server...
layer path priority
==========================================================================
meta /home/scottrif/poky/meta 5
meta-poky /home/scottrif/poky/meta-poky 5
meta-yocto-bsp /home/scottrif/poky/meta-yocto-bsp 5
workspace /home/scottrif/poky/build/workspace 99
meta-scottrif /home/scottrif/poky/build/meta-scottrif 6
Adding the layer to this file enables the build system to locate the layer during the build.
Note
During a build, the OpenEmbedded build system looks in the layers from the top of the list down to the bottom in that order.
3.2 Customizing Images
You can customize images to satisfy particular requirements. This section describes several methods and provides guidelines for each.
3.2.1 Customizing Images Using local.conf
Probably the easiest way to customize an image is to add a package by
way of the local.conf configuration file. Because it is limited to
local use, this method generally only allows you to add packages and is
not as flexible as creating your own customized image. When you add
packages using local variables this way, you need to realize that these
variable changes are in effect for every build and consequently affect
all images, which might not be what you require.
To add a package to your image using the local configuration file, use
the IMAGE_INSTALL variable with the _append operator:
IMAGE_INSTALL_append = " strace"
Use of the syntax is important -
specifically, the space between the quote and the package name, which is
strace in this example. This space is required since the _append
operator does not add the space.
Furthermore, you must use _append instead of the += operator if
you want to avoid ordering issues. The reason for this is because doing
so unconditionally appends to the variable and avoids ordering problems
due to the variable being set in image recipes and .bbclass files
with operators like ?=. Using _append ensures the operation
takes effect.
As shown in its simplest use, IMAGE_INSTALL_append affects all
images. It is possible to extend the syntax so that the variable applies
to a specific image only. Here is an example:
IMAGE_INSTALL_append_pn-core-image-minimal = " strace"
This example adds strace to the core-image-minimal image only.
You can add packages using a similar approach through the
CORE_IMAGE_EXTRA_INSTALL variable. If you use this variable, only
core-image-* images are affected.
3.2.2 Customizing Images Using Custom IMAGE_FEATURES and EXTRA_IMAGE_FEATURES
Another method for customizing your image is to enable or disable
high-level image features by using the
IMAGE_FEATURES and
EXTRA_IMAGE_FEATURES
variables. Although the functions for both variables are nearly
equivalent, best practices dictate using IMAGE_FEATURES from within
a recipe and using EXTRA_IMAGE_FEATURES from within your
local.conf file, which is found in the
Build Directory.
To understand how these features work, the best reference is
meta/classes/core-image.bbclass. This class lists out the available
IMAGE_FEATURES of which most map to package groups while some, such
as debug-tweaks and read-only-rootfs, resolve as general
configuration settings.
In summary, the file looks at the contents of the IMAGE_FEATURES
variable and then maps or configures the feature accordingly. Based on
this information, the build system automatically adds the appropriate
packages or configurations to the
IMAGE_INSTALL variable.
Effectively, you are enabling extra features by extending the class or
creating a custom class for use with specialized image .bb files.
Use the EXTRA_IMAGE_FEATURES variable from within your local
configuration file. Using a separate area from which to enable features
with this variable helps you avoid overwriting the features in the image
recipe that are enabled with IMAGE_FEATURES. The value of
EXTRA_IMAGE_FEATURES is added to IMAGE_FEATURES within
meta/conf/bitbake.conf.
To illustrate how you can use these variables to modify your image,
consider an example that selects the SSH server. The Yocto Project ships
with two SSH servers you can use with your images: Dropbear and OpenSSH.
Dropbear is a minimal SSH server appropriate for resource-constrained
environments, while OpenSSH is a well-known standard SSH server
implementation. By default, the core-image-sato image is configured
to use Dropbear. The core-image-full-cmdline and core-image-lsb
images both include OpenSSH. The core-image-minimal image does not
contain an SSH server.
You can customize your image and change these defaults. Edit the
IMAGE_FEATURES variable in your recipe or use the
EXTRA_IMAGE_FEATURES in your local.conf file so that it
configures the image you are working with to include
ssh-server-dropbear or ssh-server-openssh.
Note
See the “Image Features” section in the Yocto Project Reference Manual for a complete list of image features that ship with the Yocto Project.
3.2.3 Customizing Images Using Custom .bb Files
You can also customize an image by creating a custom recipe that defines additional software as part of the image. The following example shows the form for the two lines you need:
IMAGE_INSTALL = "packagegroup-core-x11-base package1 package2"
inherit core-image
Defining the software using a custom recipe gives you total control over
the contents of the image. It is important to use the correct names of
packages in the IMAGE_INSTALL variable. You must use the
OpenEmbedded notation and not the Debian notation for the names (e.g.
glibc-dev instead of libc6-dev).
The other method for creating a custom image is to base it on an
existing image. For example, if you want to create an image based on
core-image-sato but add the additional package strace to the
image, copy the meta/recipes-sato/images/core-image-sato.bb to a new
.bb and add the following line to the end of the copy:
IMAGE_INSTALL += "strace"
3.2.4 Customizing Images Using Custom Package Groups
For complex custom images, the best approach for customizing an image is
to create a custom package group recipe that is used to build the image
or images. A good example of a package group recipe is
meta/recipes-core/packagegroups/packagegroup-base.bb.
If you examine that recipe, you see that the PACKAGES variable lists
the package group packages to produce. The inherit packagegroup
statement sets appropriate default values and automatically adds
-dev, -dbg, and -ptest complementary packages for each
package specified in the PACKAGES statement.
Note
The inherit packagegroup line should be located near the top of the
recipe, certainly before the PACKAGES statement.
For each package you specify in PACKAGES, you can use RDEPENDS
and RRECOMMENDS entries to provide a list of packages the parent
task package should contain. You can see examples of these further down
in the packagegroup-base.bb recipe.
Here is a short, fabricated example showing the same basic pieces for a
hypothetical packagegroup defined in packagegroup-custom.bb, where
the variable PN is the standard way to abbreviate the reference to
the full packagegroup name packagegroup-custom:
DESCRIPTION = "My Custom Package Groups"
inherit packagegroup
PACKAGES = "\
${PN}-apps \
${PN}-tools \
"
RDEPENDS_${PN}-apps = "\
dropbear \
portmap \
psplash"
RDEPENDS_${PN}-tools = "\
oprofile \
oprofileui-server \
lttng-tools"
RRECOMMENDS_${PN}-tools = "\
kernel-module-oprofile"
In the previous example, two package group packages are created with
their dependencies and their recommended package dependencies listed:
packagegroup-custom-apps, and packagegroup-custom-tools. To
build an image using these package group packages, you need to add
packagegroup-custom-apps and/or packagegroup-custom-tools to
IMAGE_INSTALL. For other forms of image dependencies see the other
areas of this section.
3.2.5 Customizing an Image Hostname
By default, the configured hostname (i.e. /etc/hostname) in an image
is the same as the machine name. For example, if
MACHINE equals “qemux86”, the
configured hostname written to /etc/hostname is “qemux86”.
You can customize this name by altering the value of the “hostname”
variable in the base-files recipe using either an append file or a
configuration file. Use the following in an append file:
hostname = "myhostname"
Use the following in a configuration file:
hostname_pn-base-files = "myhostname"
Changing the default value of the variable “hostname” can be useful in certain situations. For example, suppose you need to do extensive testing on an image and you would like to easily identify the image under test from existing images with typical default hostnames. In this situation, you could change the default hostname to “testme”, which results in all the images using the name “testme”. Once testing is complete and you do not need to rebuild the image for test any longer, you can easily reset the default hostname.
Another point of interest is that if you unset the variable, the image will have no default hostname in the filesystem. Here is an example that unsets the variable in a configuration file:
hostname_pn-base-files = ""
Having no default hostname in the filesystem is suitable for environments that use dynamic hostnames such as virtual machines.
3.3 Writing a New Recipe
Recipes (.bb files) are fundamental components in the Yocto Project
environment. Each software component built by the OpenEmbedded build
system requires a recipe to define the component. This section describes
how to create, write, and test a new recipe.
Note
For information on variables that are useful for recipes and for information about recipe naming issues, see the “Recipes” section of the Yocto Project Reference Manual.
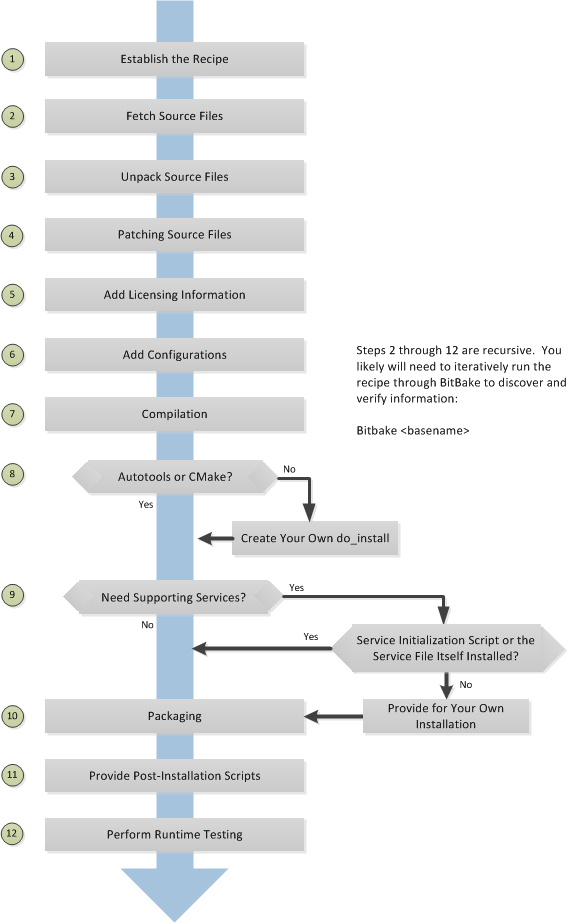
3.3.1 Overview
The following figure shows the basic process for creating a new recipe. The remainder of the section provides details for the steps.
3.3.2 Locate or Automatically Create a Base Recipe
You can always write a recipe from scratch. However, three choices exist that can help you quickly get a start on a new recipe:
devtool add: A command that assists in creating a recipe and an environment conducive to development.recipetool create: A command provided by the Yocto Project that automates creation of a base recipe based on the source files.Existing Recipes: Location and modification of an existing recipe that is similar in function to the recipe you need.
Note
For information on recipe syntax, see the “Recipe Syntax” section.
3.3.2.1 Creating the Base Recipe Using devtool add
The devtool add command uses the same logic for auto-creating the
recipe as recipetool create, which is listed below. Additionally,
however, devtool add sets up an environment that makes it easy for
you to patch the source and to make changes to the recipe as is often
necessary when adding a recipe to build a new piece of software to be
included in a build.
You can find a complete description of the devtool add command in
the “A Closer Look at devtool add” section
in the Yocto Project Application Development and the Extensible Software
Development Kit (eSDK) manual.
3.3.2.2 Creating the Base Recipe Using recipetool create
recipetool create automates creation of a base recipe given a set of
source code files. As long as you can extract or point to the source
files, the tool will construct a recipe and automatically configure all
pre-build information into the recipe. For example, suppose you have an
application that builds using Autotools. Creating the base recipe using
recipetool results in a recipe that has the pre-build dependencies,
license requirements, and checksums configured.
To run the tool, you just need to be in your Build Directory and have sourced the build environment setup script (i.e. oe-init-build-env). To get help on the tool, use the following command:
$ recipetool -h
NOTE: Starting bitbake server...
usage: recipetool [-d] [-q] [--color COLOR] [-h] <subcommand> ...
OpenEmbedded recipe tool
options:
-d, --debug Enable debug output
-q, --quiet Print only errors
--color COLOR Colorize output (where COLOR is auto, always, never)
-h, --help show this help message and exit
subcommands:
create Create a new recipe
newappend Create a bbappend for the specified target in the specified
layer
setvar Set a variable within a recipe
appendfile Create/update a bbappend to replace a target file
appendsrcfiles Create/update a bbappend to add or replace source files
appendsrcfile Create/update a bbappend to add or replace a source file
Use recipetool <subcommand> --help to get help on a specific command
Running recipetool create -o OUTFILE creates the base recipe and
locates it properly in the layer that contains your source files.
Following are some syntax examples:
Use this syntax to generate a recipe based on source. Once generated, the recipe resides in the existing source code layer:
recipetool create -o OUTFILE sourceUse this syntax to generate a recipe using code that you extract from source. The extracted code is placed in its own layer defined by
EXTERNALSRC.recipetool create -o OUTFILE -x EXTERNALSRC sourceUse this syntax to generate a recipe based on source. The options direct
recipetoolto generate debugging information. Once generated, the recipe resides in the existing source code layer:recipetool create -d -o OUTFILE source
3.3.2.3 Locating and Using a Similar Recipe
Before writing a recipe from scratch, it is often useful to discover whether someone else has already written one that meets (or comes close to meeting) your needs. The Yocto Project and OpenEmbedded communities maintain many recipes that might be candidates for what you are doing. You can find a good central index of these recipes in the OpenEmbedded Layer Index.
Working from an existing recipe or a skeleton recipe is the best way to get started. Here are some points on both methods:
Locate and modify a recipe that is close to what you want to do: This method works when you are familiar with the current recipe space. The method does not work so well for those new to the Yocto Project or writing recipes.
Some risks associated with this method are using a recipe that has areas totally unrelated to what you are trying to accomplish with your recipe, not recognizing areas of the recipe that you might have to add from scratch, and so forth. All these risks stem from unfamiliarity with the existing recipe space.
Use and modify the following skeleton recipe: If for some reason you do not want to use
recipetooland you cannot find an existing recipe that is close to meeting your needs, you can use the following structure to provide the fundamental areas of a new recipe.DESCRIPTION = "" HOMEPAGE = "" LICENSE = "" SECTION = "" DEPENDS = "" LIC_FILES_CHKSUM = "" SRC_URI = ""
3.3.3 Storing and Naming the Recipe
Once you have your base recipe, you should put it in your own layer and name it appropriately. Locating it correctly ensures that the OpenEmbedded build system can find it when you use BitBake to process the recipe.
Storing Your Recipe: The OpenEmbedded build system locates your recipe through the layer’s
conf/layer.conffile and the BBFILES variable. This variable sets up a path from which the build system can locate recipes. Here is the typical use:BBFILES += "${LAYERDIR}/recipes-*/*/*.bb \ ${LAYERDIR}/recipes-*/*/*.bbappend"
Consequently, you need to be sure you locate your new recipe inside your layer such that it can be found.
You can find more information on how layers are structured in the “Understanding and Creating Layers” section.
Naming Your Recipe: When you name your recipe, you need to follow this naming convention:
basename_version.bb
Use lower-cased characters and do not include the reserved suffixes
-native,-cross,-initial, or-devcasually (i.e. do not use them as part of your recipe name unless the string applies). Here are some examples:cups_1.7.0.bb gawk_4.0.2.bb irssi_0.8.16-rc1.bb
3.3.4 Running a Build on the Recipe
Creating a new recipe is usually an iterative process that requires using BitBake to process the recipe multiple times in order to progressively discover and add information to the recipe file.
Assuming you have sourced the build environment setup script (i.e.
oe-init-build-env) and you are in
the Build Directory, use
BitBake to process your recipe. All you need to provide is the
basename of the recipe as described in the previous section:
$ bitbake basename
During the build, the OpenEmbedded build system creates a temporary work
directory for each recipe
(${WORKDIR})
where it keeps extracted source files, log files, intermediate
compilation and packaging files, and so forth.
The path to the per-recipe temporary work directory depends on the context in which it is being built. The quickest way to find this path is to have BitBake return it by running the following:
$ bitbake -e basename | grep ^WORKDIR=
As an example, assume a Source Directory
top-level folder named poky, a default Build Directory at
poky/build, and a qemux86-poky-linux machine target system.
Furthermore, suppose your recipe is named foo_1.3.0.bb. In this
case, the work directory the build system uses to build the package
would be as follows:
poky/build/tmp/work/qemux86-poky-linux/foo/1.3.0-r0
Inside this directory you can find sub-directories such as image,
packages-split, and temp. After the build, you can examine these
to determine how well the build went.
Note
You can find log files for each task in the recipe’s temp
directory (e.g. poky/build/tmp/work/qemux86-poky-linux/foo/1.3.0-r0/temp).
Log files are named log.taskname (e.g. log.do_configure,
log.do_fetch, and log.do_compile).
You can find more information about the build process in “The Yocto Project Development Environment” chapter of the Yocto Project Overview and Concepts Manual.
3.3.5 Fetching Code
The first thing your recipe must do is specify how to fetch the source
files. Fetching is controlled mainly through the
SRC_URI variable. Your recipe
must have a SRC_URI variable that points to where the source is
located. For a graphical representation of source locations, see the
“Sources” section in
the Yocto Project Overview and Concepts Manual.
The do_fetch task uses
the prefix of each entry in the SRC_URI variable value to determine
which fetcher to use to get your
source files. It is the SRC_URI variable that triggers the fetcher.
The do_patch task uses
the variable after source is fetched to apply patches. The OpenEmbedded
build system uses
FILESOVERRIDES for
scanning directory locations for local files in SRC_URI.
The SRC_URI variable in your recipe must define each unique location
for your source files. It is good practice to not hard-code version
numbers in a URL used in SRC_URI. Rather than hard-code these
values, use ${PV},
which causes the fetch process to use the version specified in the
recipe filename. Specifying the version in this manner means that
upgrading the recipe to a future version is as simple as renaming the
recipe to match the new version.
Here is a simple example from the
meta/recipes-devtools/strace/strace_5.5.bb recipe where the source
comes from a single tarball. Notice the use of the
PV variable:
SRC_URI = "https://strace.io/files/${PV}/strace-${PV}.tar.xz \
Files mentioned in SRC_URI whose names end in a typical archive
extension (e.g. .tar, .tar.gz, .tar.bz2, .zip, and so
forth), are automatically extracted during the
do_unpack task. For
another example that specifies these types of files, see the
“Autotooled Package” section.
Another way of specifying source is from an SCM. For Git repositories,
you must specify SRCREV and
you should specify PV to include
the revision with SRCPV. Here
is an example from the recipe
meta/recipes-kernel/blktrace/blktrace_git.bb:
SRCREV = "d6918c8832793b4205ed3bfede78c2f915c23385"
PR = "r6"
PV = "1.0.5+git${SRCPV}"
SRC_URI = "git://git.kernel.dk/blktrace.git \
file://ldflags.patch"
If your SRC_URI statement includes URLs pointing to individual files
fetched from a remote server other than a version control system,
BitBake attempts to verify the files against checksums defined in your
recipe to ensure they have not been tampered with or otherwise modified
since the recipe was written. Two checksums are used:
SRC_URI[md5sum] and SRC_URI[sha256sum].
If your SRC_URI variable points to more than a single URL (excluding
SCM URLs), you need to provide the md5 and sha256 checksums for
each URL. For these cases, you provide a name for each URL as part of
the SRC_URI and then reference that name in the subsequent checksum
statements. Here is an example combining lines from the files
git.inc and git_2.24.1.bb:
SRC_URI = "${KERNELORG_MIRROR}/software/scm/git/git-${PV}.tar.gz;name=tarball \
${KERNELORG_MIRROR}/software/scm/git/git-manpages-${PV}.tar.gz;name=manpages"
SRC_URI[tarball.md5sum] = "166bde96adbbc11c8843d4f8f4f9811b"
SRC_URI[tarball.sha256sum] = "ad5334956301c86841eb1e5b1bb20884a6bad89a10a6762c958220c7cf64da02"
SRC_URI[manpages.md5sum] = "31c2272a8979022497ba3d4202df145d"
SRC_URI[manpages.sha256sum] = "9a7ae3a093bea39770eb96ca3e5b40bff7af0b9f6123f089d7821d0e5b8e1230"
Proper values for md5 and sha256 checksums might be available
with other signatures on the download page for the upstream source (e.g.
md5, sha1, sha256, GPG, and so forth). Because the
OpenEmbedded build system only deals with sha256sum and md5sum,
you should verify all the signatures you find by hand.
If no SRC_URI checksums are specified when you attempt to build the
recipe, or you provide an incorrect checksum, the build will produce an
error for each missing or incorrect checksum. As part of the error
message, the build system provides the checksum string corresponding to
the fetched file. Once you have the correct checksums, you can copy and
paste them into your recipe and then run the build again to continue.
Note
As mentioned, if the upstream source provides signatures for verifying the downloaded source code, you should verify those manually before setting the checksum values in the recipe and continuing with the build.
This final example is a bit more complicated and is from the
meta/recipes-sato/rxvt-unicode/rxvt-unicode_9.20.bb recipe. The
example’s SRC_URI statement identifies multiple files as the source
files for the recipe: a tarball, a patch file, a desktop file, and an
icon.
SRC_URI = "http://dist.schmorp.de/rxvt-unicode/Attic/rxvt-unicode-${PV}.tar.bz2 \
file://xwc.patch \
file://rxvt.desktop \
file://rxvt.png"
When you specify local files using the file:// URI protocol, the
build system fetches files from the local machine. The path is relative
to the FILESPATH variable
and searches specific directories in a certain order:
${BP},
${BPN}, and
files. The directories are assumed to be subdirectories of the
directory in which the recipe or append file resides. For another
example that specifies these types of files, see the “Single .c File
Package (Hello
World!)” section.
The previous example also specifies a patch file. Patch files are files
whose names usually end in .patch or .diff but can end with
compressed suffixes such as diff.gz and patch.bz2, for example.
The build system automatically applies patches as described in the
“Patching Code” section.
3.3.6 Unpacking Code
During the build, the
do_unpack task unpacks
the source with ${S}
pointing to where it is unpacked.
If you are fetching your source files from an upstream source archived
tarball and the tarball’s internal structure matches the common
convention of a top-level subdirectory named
${BPN}-${PV},
then you do not need to set S. However, if SRC_URI specifies to
fetch source from an archive that does not use this convention, or from
an SCM like Git or Subversion, your recipe needs to define S.
If processing your recipe using BitBake successfully unpacks the source
files, you need to be sure that the directory pointed to by ${S}
matches the structure of the source.
3.3.7 Patching Code
Sometimes it is necessary to patch code after it has been fetched. Any
files mentioned in SRC_URI whose names end in .patch or
.diff or compressed versions of these suffixes (e.g. diff.gz are
treated as patches. The
do_patch task
automatically applies these patches.
The build system should be able to apply patches with the “-p1” option
(i.e. one directory level in the path will be stripped off). If your
patch needs to have more directory levels stripped off, specify the
number of levels using the “striplevel” option in the SRC_URI entry
for the patch. Alternatively, if your patch needs to be applied in a
specific subdirectory that is not specified in the patch file, use the
“patchdir” option in the entry.
As with all local files referenced in
SRC_URI using file://,
you should place patch files in a directory next to the recipe either
named the same as the base name of the recipe
(BP and
BPN) or “files”.
3.3.8 Licensing
Your recipe needs to have both the LICENSE and LIC_FILES_CHKSUM variables:
LICENSE: This variable specifies the license for the software. If you do not know the license under which the software you are building is distributed, you should go to the source code and look for that information. Typical files containing this information includeCOPYING,LICENSE, andREADMEfiles. You could also find the information near the top of a source file. For example, given a piece of software licensed under the GNU General Public License version 2, you would setLICENSEas follows:LICENSE = "GPLv2"
The licenses you specify within
LICENSEcan have any name as long as you do not use spaces, since spaces are used as separators between license names. For standard licenses, use the names of the files inmeta/files/common-licenses/or theSPDXLICENSEMAPflag names defined inmeta/conf/licenses.conf.LIC_FILES_CHKSUM: The OpenEmbedded build system uses this variable to make sure the license text has not changed. If it has, the build produces an error and it affords you the chance to figure it out and correct the problem.You need to specify all applicable licensing files for the software. At the end of the configuration step, the build process will compare the checksums of the files to be sure the text has not changed. Any differences result in an error with the message containing the current checksum. For more explanation and examples of how to set the
LIC_FILES_CHKSUMvariable, see the “Tracking License Changes” section.To determine the correct checksum string, you can list the appropriate files in the
LIC_FILES_CHKSUMvariable with incorrect md5 strings, attempt to build the software, and then note the resulting error messages that will report the correct md5 strings. See the “Fetching Code” section for additional information.Here is an example that assumes the software has a
COPYINGfile:LIC_FILES_CHKSUM = "file://COPYING;md5=xxx"
When you try to build the software, the build system will produce an error and give you the correct string that you can substitute into the recipe file for a subsequent build.
3.3.9 Dependencies
Most software packages have a short list of other packages that they require, which are called dependencies. These dependencies fall into two main categories: build-time dependencies, which are required when the software is built; and runtime dependencies, which are required to be installed on the target in order for the software to run.
Within a recipe, you specify build-time dependencies using the
DEPENDS variable. Although
nuances exist, items specified in DEPENDS should be names of other
recipes. It is important that you specify all build-time dependencies
explicitly.
Another consideration is that configure scripts might automatically check for optional dependencies and enable corresponding functionality if those dependencies are found. If you wish to make a recipe that is more generally useful (e.g. publish the recipe in a layer for others to use), instead of hard-disabling the functionality, you can use the PACKAGECONFIG variable to allow functionality and the corresponding dependencies to be enabled and disabled easily by other users of the recipe.
Similar to build-time dependencies, you specify runtime dependencies
through a variable -
RDEPENDS, which is
package-specific. All variables that are package-specific need to have
the name of the package added to the end as an override. Since the main
package for a recipe has the same name as the recipe, and the recipe’s
name can be found through the
${PN} variable, then
you specify the dependencies for the main package by setting
RDEPENDS_${PN}. If the package were named ${PN}-tools, then you
would set RDEPENDS_${PN}-tools, and so forth.
Some runtime dependencies will be set automatically at packaging time. These dependencies include any shared library dependencies (i.e. if a package “example” contains “libexample” and another package “mypackage” contains a binary that links to “libexample” then the OpenEmbedded build system will automatically add a runtime dependency to “mypackage” on “example”). See the “Automatically Added Runtime Dependencies” section in the Yocto Project Overview and Concepts Manual for further details.
3.3.10 Configuring the Recipe
Most software provides some means of setting build-time configuration options before compilation. Typically, setting these options is accomplished by running a configure script with options, or by modifying a build configuration file.
Note
As of Yocto Project Release 1.7, some of the core recipes that
package binary configuration scripts now disable the scripts due to
the scripts previously requiring error-prone path substitution. The
OpenEmbedded build system uses pkg-config now, which is much more
robust. You can find a list of the *-config scripts that are disabled
in the “Binary Configuration Scripts Disabled” section
in the Yocto Project Reference Manual.
A major part of build-time configuration is about checking for build-time dependencies and possibly enabling optional functionality as a result. You need to specify any build-time dependencies for the software you are building in your recipe’s DEPENDS value, in terms of other recipes that satisfy those dependencies. You can often find build-time or runtime dependencies described in the software’s documentation.
The following list provides configuration items of note based on how your software is built:
Autotools: If your source files have a
configure.acfile, then your software is built using Autotools. If this is the case, you just need to worry about modifying the configuration.When using Autotools, your recipe needs to inherit the autotools class and your recipe does not have to contain a do_configure task. However, you might still want to make some adjustments. For example, you can set EXTRA_OECONF or PACKAGECONFIG_CONFARGS to pass any needed configure options that are specific to the recipe.
CMake: If your source files have a
CMakeLists.txtfile, then your software is built using CMake. If this is the case, you just need to worry about modifying the configuration.When you use CMake, your recipe needs to inherit the cmake class and your recipe does not have to contain a do_configure task. You can make some adjustments by setting EXTRA_OECMAKE to pass any needed configure options that are specific to the recipe.
Note
If you need to install one or more custom CMake toolchain files that are supplied by the application you are building, install the files to
${D}${datadir}/cmake/Modulesduringdo_install.Other: If your source files do not have a
configure.acorCMakeLists.txtfile, then your software is built using some method other than Autotools or CMake. If this is the case, you normally need to provide a do_configure task in your recipe unless, of course, there is nothing to configure.Even if your software is not being built by Autotools or CMake, you still might not need to deal with any configuration issues. You need to determine if configuration is even a required step. You might need to modify a Makefile or some configuration file used for the build to specify necessary build options. Or, perhaps you might need to run a provided, custom configure script with the appropriate options.
For the case involving a custom configure script, you would run
./configure --helpand look for the options you need to set.
Once configuration succeeds, it is always good practice to look at the
log.do_configure file to ensure that the appropriate options have
been enabled and no additional build-time dependencies need to be added
to DEPENDS. For example, if the configure script reports that it
found something not mentioned in DEPENDS, or that it did not find
something that it needed for some desired optional functionality, then
you would need to add those to DEPENDS. Looking at the log might
also reveal items being checked for, enabled, or both that you do not
want, or items not being found that are in DEPENDS, in which case
you would need to look at passing extra options to the configure script
as needed. For reference information on configure options specific to
the software you are building, you can consult the output of the
./configure --help command within ${S} or consult the software’s
upstream documentation.
3.3.11 Using Headers to Interface with Devices
If your recipe builds an application that needs to communicate with some
device or needs an API into a custom kernel, you will need to provide
appropriate header files. Under no circumstances should you ever modify
the existing
meta/recipes-kernel/linux-libc-headers/linux-libc-headers.inc file.
These headers are used to build libc and must not be compromised
with custom or machine-specific header information. If you customize
libc through modified headers all other applications that use
libc thus become affected.
Note
Never copy and customize the libc header file (i.e.
meta/recipes-kernel/linux-libc-headers/linux-libc-headers.inc).
The correct way to interface to a device or custom kernel is to use a separate package that provides the additional headers for the driver or other unique interfaces. When doing so, your application also becomes responsible for creating a dependency on that specific provider.
Consider the following:
Never modify
linux-libc-headers.inc. Consider that file to be part of thelibcsystem, and not something you use to access the kernel directly. You should accesslibcthrough specificlibccalls.Applications that must talk directly to devices should either provide necessary headers themselves, or establish a dependency on a special headers package that is specific to that driver.
For example, suppose you want to modify an existing header that adds I/O control or network support. If the modifications are used by a small number programs, providing a unique version of a header is easy and has little impact. When doing so, bear in mind the guidelines in the previous list.
Note
If for some reason your changes need to modify the behavior of the libc,
and subsequently all other applications on the system, use a .bbappend
to modify the linux-kernel-headers.inc file. However, take care to not
make the changes machine specific.
Consider a case where your kernel is older and you need an older
libc ABI. The headers installed by your recipe should still be a
standard mainline kernel, not your own custom one.
When you use custom kernel headers you need to get them from STAGING_KERNEL_DIR, which is the directory with kernel headers that are required to build out-of-tree modules. Your recipe will also need the following:
do_configure[depends] += "virtual/kernel:do_shared_workdir"
3.3.12 Compilation
During a build, the do_compile task happens after source is fetched,
unpacked, and configured. If the recipe passes through do_compile
successfully, nothing needs to be done.
However, if the compile step fails, you need to diagnose the failure. Here are some common issues that cause failures.
Note
For cases where improper paths are detected for configuration files
or for when libraries/headers cannot be found, be sure you are using
the more robust pkg-config. See the note in section
“Configuring the Recipe” for additional information.
Parallel build failures: These failures manifest themselves as intermittent errors, or errors reporting that a file or directory that should be created by some other part of the build process could not be found. This type of failure can occur even if, upon inspection, the file or directory does exist after the build has failed, because that part of the build process happened in the wrong order.
To fix the problem, you need to either satisfy the missing dependency in the Makefile or whatever script produced the Makefile, or (as a workaround) set PARALLEL_MAKE to an empty string:
PARALLEL_MAKE = ""
For information on parallel Makefile issues, see the “Debugging Parallel Make Races” section.
Improper host path usage: This failure applies to recipes building for the target or
nativesdkonly. The failure occurs when the compilation process uses improper headers, libraries, or other files from the host system when cross-compiling for the target.To fix the problem, examine the
log.do_compilefile to identify the host paths being used (e.g./usr/include,/usr/lib, and so forth) and then either add configure options, apply a patch, or do both.Failure to find required libraries/headers: If a build-time dependency is missing because it has not been declared in DEPENDS, or because the dependency exists but the path used by the build process to find the file is incorrect and the configure step did not detect it, the compilation process could fail. For either of these failures, the compilation process notes that files could not be found. In these cases, you need to go back and add additional options to the configure script as well as possibly add additional build-time dependencies to
DEPENDS.Occasionally, it is necessary to apply a patch to the source to ensure the correct paths are used. If you need to specify paths to find files staged into the sysroot from other recipes, use the variables that the OpenEmbedded build system provides (e.g.
STAGING_BINDIR,STAGING_INCDIR,STAGING_DATADIR, and so forth).
3.3.13 Installing
During do_install, the task copies the built files along with their
hierarchy to locations that would mirror their locations on the target
device. The installation process copies files from the
${S},
${B}, and
${WORKDIR}
directories to the ${D}
directory to create the structure as it should appear on the target
system.
How your software is built affects what you must do to be sure your software is installed correctly. The following list describes what you must do for installation depending on the type of build system used by the software being built:
Autotools and CMake: If the software your recipe is building uses Autotools or CMake, the OpenEmbedded build system understands how to install the software. Consequently, you do not have to have a
do_installtask as part of your recipe. You just need to make sure the install portion of the build completes with no issues. However, if you wish to install additional files not already being installed bymake install, you should do this using ado_install_appendfunction using the install command as described in the “Manual” bulleted item later in this list.Other (using
make install): You need to define ado_installfunction in your recipe. The function should calloe_runmake installand will likely need to pass in the destination directory as well. How you pass that path is dependent on how theMakefilebeing run is written (e.g.DESTDIR=${D},PREFIX=${D},INSTALLROOT=${D}, and so forth).For an example recipe using
make install, see the “Makefile-Based Package” section.Manual: You need to define a
do_installfunction in your recipe. The function must first useinstall -dto create the directories under${D}. Once the directories exist, your function can useinstallto manually install the built software into the directories.You can find more information on
installat https://www.gnu.org/software/coreutils/manual/html_node/install-invocation.html.
For the scenarios that do not use Autotools or CMake, you need to track
the installation and diagnose and fix any issues until everything
installs correctly. You need to look in the default location of
${D}, which is ${WORKDIR}/image, to be sure your files have been
installed correctly.
Note
During the installation process, you might need to modify some of the installed files to suit the target layout. For example, you might need to replace hard-coded paths in an initscript with values of variables provided by the build system, such as replacing
/usr/bin/with${bindir}. If you do perform such modifications duringdo_install, be sure to modify the destination file after copying rather than before copying. Modifying after copying ensures that the build system can re-executedo_installif needed.oe_runmake install, which can be run directly or can be run indirectly by the autotools and cmake classes, runsmake installin parallel. Sometimes, a Makefile can have missing dependencies between targets that can result in race conditions. If you experience intermittent failures duringdo_install, you might be able to work around them by disabling parallel Makefile installs by adding the following to the recipe:PARALLEL_MAKEINST = ""
See PARALLEL_MAKEINST for additional information.
If you need to install one or more custom CMake toolchain files that are supplied by the application you are building, install the files to
${D}${datadir}/cmake/Modulesduring do_install.
3.3.14 Enabling System Services
If you want to install a service, which is a process that usually starts on boot and runs in the background, then you must include some additional definitions in your recipe.
If you are adding services and the service initialization script or the
service file itself is not installed, you must provide for that
installation in your recipe using a do_install_append function. If
your recipe already has a do_install function, update the function
near its end rather than adding an additional do_install_append
function.
When you create the installation for your services, you need to
accomplish what is normally done by make install. In other words,
make sure your installation arranges the output similar to how it is
arranged on the target system.
The OpenEmbedded build system provides support for starting services two different ways:
SysVinit: SysVinit is a system and service manager that manages the init system used to control the very basic functions of your system. The init program is the first program started by the Linux kernel when the system boots. Init then controls the startup, running and shutdown of all other programs.
To enable a service using SysVinit, your recipe needs to inherit the update-rc.d class. The class helps facilitate safely installing the package on the target.
You will need to set the INITSCRIPT_PACKAGES, INITSCRIPT_NAME, and INITSCRIPT_PARAMS variables within your recipe.
systemd: System Management Daemon (systemd) was designed to replace SysVinit and to provide enhanced management of services. For more information on systemd, see the systemd homepage at https://freedesktop.org/wiki/Software/systemd/.
To enable a service using systemd, your recipe needs to inherit the systemd class. See the
systemd.bbclassfile located in your Source Directory section for more information.
3.3.15 Packaging
Successful packaging is a combination of automated processes performed by the OpenEmbedded build system and some specific steps you need to take. The following list describes the process:
Splitting Files: The
do_packagetask splits the files produced by the recipe into logical components. Even software that produces a single binary might still have debug symbols, documentation, and other logical components that should be split out. Thedo_packagetask ensures that files are split up and packaged correctly.Running QA Checks: The insane class adds a step to the package generation process so that output quality assurance checks are generated by the OpenEmbedded build system. This step performs a range of checks to be sure the build’s output is free of common problems that show up during runtime. For information on these checks, see the insane class and the “QA Error and Warning Messages” chapter in the Yocto Project Reference Manual.
Hand-Checking Your Packages: After you build your software, you need to be sure your packages are correct. Examine the
${WORKDIR}/packages-splitdirectory and make sure files are where you expect them to be. If you discover problems, you can set PACKAGES, FILES,do_install(_append), and so forth as needed.Splitting an Application into Multiple Packages: If you need to split an application into several packages, see the “Splitting an Application into Multiple Packages” section for an example.
Installing a Post-Installation Script: For an example showing how to install a post-installation script, see the “Post-Installation Scripts” section.
Marking Package Architecture: Depending on what your recipe is building and how it is configured, it might be important to mark the packages produced as being specific to a particular machine, or to mark them as not being specific to a particular machine or architecture at all.
By default, packages apply to any machine with the same architecture as the target machine. When a recipe produces packages that are machine-specific (e.g. the MACHINE value is passed into the configure script or a patch is applied only for a particular machine), you should mark them as such by adding the following to the recipe:
PACKAGE_ARCH = "${MACHINE_ARCH}"
On the other hand, if the recipe produces packages that do not contain anything specific to the target machine or architecture at all (e.g. recipes that simply package script files or configuration files), you should use the allarch class to do this for you by adding this to your recipe:
inherit allarch
Ensuring that the package architecture is correct is not critical while you are doing the first few builds of your recipe. However, it is important in order to ensure that your recipe rebuilds (or does not rebuild) appropriately in response to changes in configuration, and to ensure that you get the appropriate packages installed on the target machine, particularly if you run separate builds for more than one target machine.
3.3.17 Using Virtual Providers
Prior to a build, if you know that several different recipes provide the
same functionality, you can use a virtual provider (i.e. virtual/*)
as a placeholder for the actual provider. The actual provider is
determined at build-time.
A common scenario where a virtual provider is used would be for the
kernel recipe. Suppose you have three kernel recipes whose
PN values map to kernel-big,
kernel-mid, and kernel-small. Furthermore, each of these recipes
in some way uses a PROVIDES
statement that essentially identifies itself as being able to provide
virtual/kernel. Here is one way through the
kernel class:
PROVIDES += "${@ "virtual/kernel" if (d.getVar("KERNEL_PACKAGE_NAME") == "kernel") else "" }"
Any recipe that inherits the kernel class is
going to utilize a PROVIDES statement that identifies that recipe as
being able to provide the virtual/kernel item.
Now comes the time to actually build an image and you need a kernel
recipe, but which one? You can configure your build to call out the
kernel recipe you want by using the
PREFERRED_PROVIDER
variable. As an example, consider the
x86-base.inc
include file, which is a machine (i.e.
MACHINE) configuration file.
This include file is the reason all x86-based machines use the
linux-yocto kernel. Here are the relevant lines from the include
file:
PREFERRED_PROVIDER_virtual/kernel ??= "linux-yocto"
PREFERRED_VERSION_linux-yocto ??= "4.15%"
When you use a virtual provider, you do not have to “hard code” a recipe
name as a build dependency. You can use the
DEPENDS variable to state the
build is dependent on virtual/kernel for example:
DEPENDS = "virtual/kernel"
During the build, the OpenEmbedded build system picks
the correct recipe needed for the virtual/kernel dependency based on
the PREFERRED_PROVIDER variable. If you want to use the small kernel
mentioned at the beginning of this section, configure your build as
follows:
PREFERRED_PROVIDER_virtual/kernel ??= "kernel-small"
Note
Any recipe that PROVIDES a virtual/* item that is ultimately not
selected through PREFERRED_PROVIDER does not get built. Preventing these
recipes from building is usually the desired behavior since this mechanism’s
purpose is to select between mutually exclusive alternative providers.
The following lists specific examples of virtual providers:
virtual/kernel: Provides the name of the kernel recipe to use when building a kernel image.virtual/bootloader: Provides the name of the bootloader to use when building an image.virtual/libgbm: Providesgbm.pc.virtual/egl: Providesegl.pcand possiblywayland-egl.pc.virtual/libgl: Providesgl.pc(i.e. libGL).virtual/libgles1: Providesglesv1_cm.pc(i.e. libGLESv1_CM).virtual/libgles2: Providesglesv2.pc(i.e. libGLESv2).
3.3.18 Properly Versioning Pre-Release Recipes
Sometimes the name of a recipe can lead to versioning problems when the
recipe is upgraded to a final release. For example, consider the
irssi_0.8.16-rc1.bb recipe file in the list of example recipes in
the “Storing and Naming the
Recipe” section. This
recipe is at a release candidate stage (i.e. “rc1”). When the recipe is
released, the recipe filename becomes irssi_0.8.16.bb. The version
change from 0.8.16-rc1 to 0.8.16 is seen as a decrease by the
build system and package managers, so the resulting packages will not
correctly trigger an upgrade.
In order to ensure the versions compare properly, the recommended convention is to set PV within the recipe to “previous_version+current_version”. You can use an additional variable so that you can use the current version elsewhere. Here is an example:
REALPV = "0.8.16-rc1"
PV = "0.8.15+${REALPV}"
3.3.19 Post-Installation Scripts
Post-installation scripts run immediately after installing a package on
the target or during image creation when a package is included in an
image. To add a post-installation script to a package, add a
pkg_postinst_PACKAGENAME() function to the recipe file
(.bb) and replace PACKAGENAME with the name of the package you want
to attach to the postinst script. To apply the post-installation
script to the main package for the recipe, which is usually what is
required, specify
${PN} in place of
PACKAGENAME.
A post-installation function has the following structure:
pkg_postinst_PACKAGENAME() {
# Commands to carry out
}
The script defined in the post-installation function is called when the root filesystem is created. If the script succeeds, the package is marked as installed.
Note
Any RPM post-installation script that runs on the target should return a 0 exit code. RPM does not allow non-zero exit codes for these scripts, and the RPM package manager will cause the package to fail installation on the target.
Sometimes it is necessary for the execution of a post-installation
script to be delayed until the first boot. For example, the script might
need to be executed on the device itself. To delay script execution
until boot time, you must explicitly mark post installs to defer to the
target. You can use pkg_postinst_ontarget() or call
postinst_intercept delay_to_first_boot from pkg_postinst(). Any
failure of a pkg_postinst() script (including exit 1) triggers an
error during the
do_rootfs task.
If you have recipes that use pkg_postinst function and they require
the use of non-standard native tools that have dependencies during
rootfs construction, you need to use the
PACKAGE_WRITE_DEPS
variable in your recipe to list these tools. If you do not use this
variable, the tools might be missing and execution of the
post-installation script is deferred until first boot. Deferring the
script to first boot is undesirable and for read-only rootfs impossible.
Note
Equivalent support for pre-install, pre-uninstall, and post-uninstall
scripts exist by way of pkg_preinst, pkg_prerm, and pkg_postrm,
respectively. These scrips work in exactly the same way as does
pkg_postinst with the exception that they run at different times. Also,
because of when they run, they are not applicable to being run at image
creation time like pkg_postinst.
3.3.20 Testing
The final step for completing your recipe is to be sure that the software you built runs correctly. To accomplish runtime testing, add the build’s output packages to your image and test them on the target.
For information on how to customize your image by adding specific packages, see the “Customizing Images” section.
3.3.21 Examples
To help summarize how to write a recipe, this section provides some examples given various scenarios:
Recipes that use local files
Using an Autotooled package
Using a Makefile-based package
Splitting an application into multiple packages
Adding binaries to an image
3.3.21.1 Single .c File Package (Hello World!)
Building an application from a single file that is stored locally (e.g.
under files) requires a recipe that has the file listed in the
SRC_URI variable. Additionally, you need to manually write the
do_compile and do_install tasks. The S variable defines the
directory containing the source code, which is set to
WORKDIR in this case - the
directory BitBake uses for the build.
SUMMARY = "Simple helloworld application"
SECTION = "examples"
LICENSE = "MIT"
LIC_FILES_CHKSUM = "file://${COMMON_LICENSE_DIR}/MIT;md5=0835ade698e0bcf8506ecda2f7b4f302"
SRC_URI = "file://helloworld.c"
S = "${WORKDIR}"
do_compile() {
${CC} helloworld.c -o helloworld
}
do_install() {
install -d ${D}${bindir}
install -m 0755 helloworld ${D}${bindir}
}
By default, the helloworld, helloworld-dbg, and
helloworld-dev packages are built. For information on how to
customize the packaging process, see the “Splitting an Application into
Multiple Packages”
section.
3.3.21.2 Autotooled Package
Applications that use Autotools such as autoconf and automake
require a recipe that has a source archive listed in SRC_URI and
also inherit the
autotools class,
which contains the definitions of all the steps needed to build an
Autotool-based application. The result of the build is automatically
packaged. And, if the application uses NLS for localization, packages
with local information are generated (one package per language).
Following is one example: (hello_2.3.bb)
SUMMARY = "GNU Helloworld application"
SECTION = "examples"
LICENSE = "GPLv2+"
LIC_FILES_CHKSUM = "file://COPYING;md5=751419260aa954499f7abaabaa882bbe"
SRC_URI = "${GNU_MIRROR}/hello/hello-${PV}.tar.gz"
inherit autotools gettext
The variable LIC_FILES_CHKSUM is used to track source license
changes as described in the
“Tracking License Changes” section in
the Yocto Project Overview and Concepts Manual. You can quickly create
Autotool-based recipes in a manner similar to the previous example.
3.3.21.3 Makefile-Based Package
Applications that use GNU make also require a recipe that has the
source archive listed in SRC_URI. You do not need to add a
do_compile step since by default BitBake starts the make command
to compile the application. If you need additional make options, you
should store them in the
EXTRA_OEMAKE or
PACKAGECONFIG_CONFARGS
variables. BitBake passes these options into the GNU make
invocation. Note that a do_install task is still required.
Otherwise, BitBake runs an empty do_install task by default.
Some applications might require extra parameters to be passed to the
compiler. For example, the application might need an additional header
path. You can accomplish this by adding to the CFLAGS variable. The
following example shows this:
CFLAGS_prepend = "-I ${S}/include "
In the following example, mtd-utils is a makefile-based package:
SUMMARY = "Tools for managing memory technology devices"
SECTION = "base"
DEPENDS = "zlib lzo e2fsprogs util-linux"
HOMEPAGE = "http://www.linux-mtd.infradead.org/"
LICENSE = "GPLv2+"
LIC_FILES_CHKSUM = "file://COPYING;md5=0636e73ff0215e8d672dc4c32c317bb3 \
file://include/common.h;beginline=1;endline=17;md5=ba05b07912a44ea2bf81ce409380049c"
# Use the latest version at 26 Oct, 2013
SRCREV = "9f107132a6a073cce37434ca9cda6917dd8d866b"
SRC_URI = "git://git.infradead.org/mtd-utils.git \
file://add-exclusion-to-mkfs-jffs2-git-2.patch \
"
PV = "1.5.1+git${SRCPV}"
S = "${WORKDIR}/git"
EXTRA_OEMAKE = "'CC=${CC}' 'RANLIB=${RANLIB}' 'AR=${AR}' 'CFLAGS=${CFLAGS} -I${S}/include -DWITHOUT_XATTR' 'BUILDDIR=${S}'"
do_install () {
oe_runmake install DESTDIR=${D} SBINDIR=${sbindir} MANDIR=${mandir} INCLUDEDIR=${includedir}
}
PACKAGES =+ "mtd-utils-jffs2 mtd-utils-ubifs mtd-utils-misc"
FILES_mtd-utils-jffs2 = "${sbindir}/mkfs.jffs2 ${sbindir}/jffs2dump ${sbindir}/jffs2reader ${sbindir}/sumtool"
FILES_mtd-utils-ubifs = "${sbindir}/mkfs.ubifs ${sbindir}/ubi*"
FILES_mtd-utils-misc = "${sbindir}/nftl* ${sbindir}/ftl* ${sbindir}/rfd* ${sbindir}/doc* ${sbindir}/serve_image ${sbindir}/recv_image"
PARALLEL_MAKE = ""
BBCLASSEXTEND = "native"
3.3.21.4 Splitting an Application into Multiple Packages
You can use the variables PACKAGES and FILES to split an
application into multiple packages.
Following is an example that uses the libxpm recipe. By default,
this recipe generates a single package that contains the library along
with a few binaries. You can modify the recipe to split the binaries
into separate packages:
require xorg-lib-common.inc
SUMMARY = "Xpm: X Pixmap extension library"
LICENSE = "BSD"
LIC_FILES_CHKSUM = "file://COPYING;md5=51f4270b012ecd4ab1a164f5f4ed6cf7"
DEPENDS += "libxext libsm libxt"
PE = "1"
XORG_PN = "libXpm"
PACKAGES =+ "sxpm cxpm"
FILES_cxpm = "${bindir}/cxpm"
FILES_sxpm = "${bindir}/sxpm"
In the previous example, we want to ship the sxpm and cxpm
binaries in separate packages. Since bindir would be packaged into
the main PN package by default, we prepend the PACKAGES variable
so additional package names are added to the start of list. This results
in the extra FILES_* variables then containing information that
define which files and directories go into which packages. Files
included by earlier packages are skipped by latter packages. Thus, the
main PN package does not include the above listed files.
3.3.21.5 Packaging Externally Produced Binaries
Sometimes, you need to add pre-compiled binaries to an image. For example, suppose that binaries for proprietary code exist, which are created by a particular division of a company. Your part of the company needs to use those binaries as part of an image that you are building using the OpenEmbedded build system. Since you only have the binaries and not the source code, you cannot use a typical recipe that expects to fetch the source specified in SRC_URI and then compile it.
One method is to package the binaries and then install them as part of the image. Generally, it is not a good idea to package binaries since, among other things, it can hinder the ability to reproduce builds and could lead to compatibility problems with ABI in the future. However, sometimes you have no choice.
The easiest solution is to create a recipe that uses the
bin_package class
and to be sure that you are using default locations for build artifacts.
In most cases, the bin_package class handles “skipping” the
configure and compile steps as well as sets things up to grab packages
from the appropriate area. In particular, this class sets noexec on
both the do_configure
and do_compile tasks,
sets FILES_${PN} to “/” so that it picks up all files, and sets up a
do_install task, which
effectively copies all files from ${S} to ${D}. The
bin_package class works well when the files extracted into ${S}
are already laid out in the way they should be laid out on the target.
For more information on these variables, see the
FILES,
PN,
S, and
D variables in the Yocto Project
Reference Manual’s variable glossary.
Note
Using DEPENDS is a good idea even for components distributed in binary form, and is often necessary for shared libraries. For a shared library, listing the library dependencies in
DEPENDSmakes sure that the libraries are available in the staging sysroot when other recipes link against the library, which might be necessary for successful linking.Using
DEPENDSalso allows runtime dependencies between packages to be added automatically. See the “Automatically Added Runtime Dependencies” section in the Yocto Project Overview and Concepts Manual for more information.
If you cannot use the bin_package class, you need to be sure you are
doing the following:
Create a recipe where the do_configure and do_compile tasks do nothing: It is usually sufficient to just not define these tasks in the recipe, because the default implementations do nothing unless a Makefile is found in
${S}.If
${S}might contain a Makefile, or if you inherit some class that replacesdo_configureanddo_compilewith custom versions, then you can use the[noexec]flag to turn the tasks into no-ops, as follows:do_configure[noexec] = "1" do_compile[noexec] = "1"
Unlike Deleting a Task, using the flag preserves the dependency chain from the do_fetch, do_unpack, and do_patch tasks to the do_install task.
Make sure your
do_installtask installs the binaries appropriately.Ensure that you set up FILES (usually
FILES_${PN}) to point to the files you have installed, which of course depends on where you have installed them and whether those files are in different locations than the defaults.
Note
If image prelinking is enabled (e.g. “image-prelink” is in USER_CLASSES which it is by default), prelink will change the binaries in the generated images and this often catches people out. Remove that class to ensure binaries are preserved exactly if that is necessary.
3.3.22 Following Recipe Style Guidelines
When writing recipes, it is good to conform to existing style guidelines. The OpenEmbedded Styleguide wiki page provides rough guidelines for preferred recipe style.
It is common for existing recipes to deviate a bit from this style.
However, aiming for at least a consistent style is a good idea. Some
practices, such as omitting spaces around = operators in assignments
or ordering recipe components in an erratic way, are widely seen as poor
style.
3.3.23 Recipe Syntax
Understanding recipe file syntax is important for writing recipes. The following list overviews the basic items that make up a BitBake recipe file. For more complete BitBake syntax descriptions, see the “bitbake-user-manual/bitbake-user-manual-metadata” chapter of the BitBake User Manual.
Variable Assignments and Manipulations: Variable assignments allow a value to be assigned to a variable. The assignment can be static text or might include the contents of other variables. In addition to the assignment, appending and prepending operations are also supported.
The following example shows some of the ways you can use variables in recipes:
S = "${WORKDIR}/postfix-${PV}" CFLAGS += "-DNO_ASM" SRC_URI_append = " file://fixup.patch"
Functions: Functions provide a series of actions to be performed. You usually use functions to override the default implementation of a task function or to complement a default function (i.e. append or prepend to an existing function). Standard functions use
shshell syntax, although access to OpenEmbedded variables and internal methods are also available.The following is an example function from the
sedrecipe:do_install () { autotools_do_install install -d ${D}${base_bindir} mv ${D}${bindir}/sed ${D}${base_bindir}/sed rmdir ${D}${bindir}/ }It is also possible to implement new functions that are called between existing tasks as long as the new functions are not replacing or complementing the default functions. You can implement functions in Python instead of shell. Both of these options are not seen in the majority of recipes.
Keywords: BitBake recipes use only a few keywords. You use keywords to include common functions (
inherit), load parts of a recipe from other files (includeandrequire) and export variables to the environment (export).The following example shows the use of some of these keywords:
export POSTCONF = "${STAGING_BINDIR}/postconf" inherit autoconf require otherfile.inc
Comments (#): Any lines that begin with the hash character (
#) are treated as comment lines and are ignored:# This is a comment
This next list summarizes the most important and most commonly used parts of the recipe syntax. For more information on these parts of the syntax, you can reference the Syntax and Operators chapter in the BitBake User Manual.
Line Continuation (\): Use the backward slash (
\) character to split a statement over multiple lines. Place the slash character at the end of the line that is to be continued on the next line:VAR = "A really long \ line"
Note
You cannot have any characters including spaces or tabs after the slash character.
Using Variables (${VARNAME}): Use the
${VARNAME}syntax to access the contents of a variable:SRC_URI = "${SOURCEFORGE_MIRROR}/libpng/zlib-${PV}.tar.gz"
Note
It is important to understand that the value of a variable expressed in this form does not get substituted automatically. The expansion of these expressions happens on-demand later (e.g. usually when a function that makes reference to the variable executes). This behavior ensures that the values are most appropriate for the context in which they are finally used. On the rare occasion that you do need the variable expression to be expanded immediately, you can use the := operator instead of = when you make the assignment, but this is not generally needed.
Quote All Assignments (“value”): Use double quotes around values in all variable assignments (e.g.
"value"). Following is an example:VAR1 = "${OTHERVAR}" VAR2 = "The version is ${PV}"
Conditional Assignment (?=): Conditional assignment is used to assign a value to a variable, but only when the variable is currently unset. Use the question mark followed by the equal sign (
?=) to make a “soft” assignment used for conditional assignment. Typically, “soft” assignments are used in thelocal.conffile for variables that are allowed to come through from the external environment.Here is an example where
VAR1is set to “New value” if it is currently empty. However, ifVAR1has already been set, it remains unchanged:VAR1 ?= "New value"
In this next example,
VAR1is left with the value “Original value”:VAR1 = "Original value" VAR1 ?= "New value"
Appending (+=): Use the plus character followed by the equals sign (
+=) to append values to existing variables.Note
This operator adds a space between the existing content of the variable and the new content.
Here is an example:
SRC_URI += "file://fix-makefile.patch"
Prepending (=+): Use the equals sign followed by the plus character (
=+) to prepend values to existing variables.Note
This operator adds a space between the new content and the existing content of the variable.
Here is an example:
VAR =+ "Starts"
Appending (_append): Use the
_appendoperator to append values to existing variables. This operator does not add any additional space. Also, the operator is applied after all the+=, and=+operators have been applied and after all=assignments have occurred.The following example shows the space being explicitly added to the start to ensure the appended value is not merged with the existing value:
SRC_URI_append = " file://fix-makefile.patch"
You can also use the
_appendoperator with overrides, which results in the actions only being performed for the specified target or machine:SRC_URI_append_sh4 = " file://fix-makefile.patch"
Prepending (_prepend): Use the
_prependoperator to prepend values to existing variables. This operator does not add any additional space. Also, the operator is applied after all the+=, and=+operators have been applied and after all=assignments have occurred.The following example shows the space being explicitly added to the end to ensure the prepended value is not merged with the existing value:
CFLAGS_prepend = "-I${S}/myincludes "
You can also use the
_prependoperator with overrides, which results in the actions only being performed for the specified target or machine:CFLAGS_prepend_sh4 = "-I${S}/myincludes "
Overrides: You can use overrides to set a value conditionally, typically based on how the recipe is being built. For example, to set the KBRANCH variable’s value to “standard/base” for any target MACHINE, except for qemuarm where it should be set to “standard/arm-versatile-926ejs”, you would do the following:
KBRANCH = "standard/base" KBRANCH_qemuarm = "standard/arm-versatile-926ejs"
Overrides are also used to separate alternate values of a variable in other situations. For example, when setting variables such as FILES and RDEPENDS that are specific to individual packages produced by a recipe, you should always use an override that specifies the name of the package.
Indentation: Use spaces for indentation rather than tabs. For shell functions, both currently work. However, it is a policy decision of the Yocto Project to use tabs in shell functions. Realize that some layers have a policy to use spaces for all indentation.
Using Python for Complex Operations: For more advanced processing, it is possible to use Python code during variable assignments (e.g. search and replacement on a variable).
You indicate Python code using the
${@python_code}syntax for the variable assignment:SRC_URI = "ftp://ftp.info-zip.org/pub/infozip/src/zip${@d.getVar('PV',1).replace('.', '')}.tgz
Shell Function Syntax: Write shell functions as if you were writing a shell script when you describe a list of actions to take. You should ensure that your script works with a generic
shand that it does not require anybashor other shell-specific functionality. The same considerations apply to various system utilities (e.g.sed,grep,awk, and so forth) that you might wish to use. If in doubt, you should check with multiple implementations - including those from BusyBox.
3.4 Adding a New Machine
Adding a new machine to the Yocto Project is a straightforward process. This section describes how to add machines that are similar to those that the Yocto Project already supports.
Note
Although well within the capabilities of the Yocto Project, adding a
totally new architecture might require changes to gcc/glibc
and to the site information, which is beyond the scope of this
manual.
For a complete example that shows how to add a new machine, see the “Creating a new BSP Layer Using the bitbake-layers Script” section in the Yocto Project Board Support Package (BSP) Developer’s Guide.
3.4.1 Adding the Machine Configuration File
To add a new machine, you need to add a new machine configuration file
to the layer’s conf/machine directory. This configuration file
provides details about the device you are adding.
The OpenEmbedded build system uses the root name of the machine
configuration file to reference the new machine. For example, given a
machine configuration file named crownbay.conf, the build system
recognizes the machine as “crownbay”.
The most important variables you must set in your machine configuration file or include from a lower-level configuration file are as follows:
TARGET_ARCH(e.g. “arm”)PREFERRED_PROVIDER_virtual/kernelMACHINE_FEATURES(e.g. “apm screen wifi”)
You might also need these variables:
SERIAL_CONSOLES(e.g. “115200;ttyS0 115200;ttyS1”)KERNEL_IMAGETYPE(e.g. “zImage”)IMAGE_FSTYPES(e.g. “tar.gz jffs2”)
You can find full details on these variables in the reference section.
You can leverage existing machine .conf files from
meta-yocto-bsp/conf/machine/.
3.4.2 Adding a Kernel for the Machine
The OpenEmbedded build system needs to be able to build a kernel for the
machine. You need to either create a new kernel recipe for this machine,
or extend an existing kernel recipe. You can find several kernel recipe
examples in the Source Directory at meta/recipes-kernel/linux that
you can use as references.
If you are creating a new kernel recipe, normal recipe-writing rules
apply for setting up a SRC_URI. Thus, you need to specify any
necessary patches and set S to point at the source code. You need to
create a do_configure task that configures the unpacked kernel with
a defconfig file. You can do this by using a make defconfig
command or, more commonly, by copying in a suitable defconfig file
and then running make oldconfig. By making use of inherit kernel
and potentially some of the linux-*.inc files, most other
functionality is centralized and the defaults of the class normally work
well.
If you are extending an existing kernel recipe, it is usually a matter
of adding a suitable defconfig file. The file needs to be added into
a location similar to defconfig files used for other machines in a
given kernel recipe. A possible way to do this is by listing the file in
the SRC_URI and adding the machine to the expression in
COMPATIBLE_MACHINE:
COMPATIBLE_MACHINE = '(qemux86|qemumips)'
For more information on defconfig files, see the
“Changing the Configuration”
section in the Yocto Project Linux Kernel Development Manual.
3.4.3 Adding a Formfactor Configuration File
A formfactor configuration file provides information about the target hardware for which the image is being built and information that the build system cannot obtain from other sources such as the kernel. Some examples of information contained in a formfactor configuration file include framebuffer orientation, whether or not the system has a keyboard, the positioning of the keyboard in relation to the screen, and the screen resolution.
The build system uses reasonable defaults in most cases. However, if
customization is necessary, you need to create a machconfig file in
the meta/recipes-bsp/formfactor/files directory. This directory
contains directories for specific machines such as qemuarm and
qemux86. For information about the settings available and the
defaults, see the meta/recipes-bsp/formfactor/files/config file
found in the same area.
Following is an example for “qemuarm” machine:
HAVE_TOUCHSCREEN=1
HAVE_KEYBOARD=1
DISPLAY_CAN_ROTATE=0
DISPLAY_ORIENTATION=0
#DISPLAY_WIDTH_PIXELS=640
#DISPLAY_HEIGHT_PIXELS=480
#DISPLAY_BPP=16
DISPLAY_DPI=150
DISPLAY_SUBPIXEL_ORDER=vrgb
3.5 Upgrading Recipes
Over time, upstream developers publish new versions for software built by layer recipes. It is recommended to keep recipes up-to-date with upstream version releases.
While several methods exist that allow you upgrade a recipe, you might
consider checking on the upgrade status of a recipe first. You can do so
using the devtool check-upgrade-status command. See the
“Checking on the Upgrade Status of a Recipe”
section in the Yocto Project Reference Manual for more information.
The remainder of this section describes three ways you can upgrade a
recipe. You can use the Automated Upgrade Helper (AUH) to set up
automatic version upgrades. Alternatively, you can use
devtool upgrade to set up semi-automatic version upgrades. Finally,
you can manually upgrade a recipe by editing the recipe itself.
3.5.1 Using the Auto Upgrade Helper (AUH)
The AUH utility works in conjunction with the OpenEmbedded build system in order to automatically generate upgrades for recipes based on new versions being published upstream. Use AUH when you want to create a service that performs the upgrades automatically and optionally sends you an email with the results.
AUH allows you to update several recipes with a single use. You can also optionally perform build and integration tests using images with the results saved to your hard drive and emails of results optionally sent to recipe maintainers. Finally, AUH creates Git commits with appropriate commit messages in the layer’s tree for the changes made to recipes.
Note
Conditions do exist when you should not use AUH to upgrade recipes
and you should instead use either devtool upgrade or upgrade your
recipes manually:
When AUH cannot complete the upgrade sequence. This situation usually results because custom patches carried by the recipe cannot be automatically rebased to the new version. In this case,
devtool upgradeallows you to manually resolve conflicts.When for any reason you want fuller control over the upgrade process. For example, when you want special arrangements for testing.
The following steps describe how to set up the AUH utility:
Be Sure the Development Host is Set Up: You need to be sure that your development host is set up to use the Yocto Project. For information on how to set up your host, see the “Preparing the Build Host” section.
Make Sure Git is Configured: The AUH utility requires Git to be configured because AUH uses Git to save upgrades. Thus, you must have Git user and email configured. The following command shows your configurations:
$ git config --list
If you do not have the user and email configured, you can use the following commands to do so:
$ git config --global user.name some_name $ git config --global user.email username@domain.com
Clone the AUH Repository: To use AUH, you must clone the repository onto your development host. The following command uses Git to create a local copy of the repository on your system:
$ git clone git://git.yoctoproject.org/auto-upgrade-helper Cloning into 'auto-upgrade-helper'... remote: Counting objects: 768, done. remote: Compressing objects: 100% (300/300), done. remote: Total 768 (delta 499), reused 703 (delta 434) Receiving objects: 100% (768/768), 191.47 KiB | 98.00 KiB/s, done. Resolving deltas: 100% (499/499), done. Checking connectivity... done.
AUH is not part of the OpenEmbedded-Core (OE-Core) or Poky repositories.
Create a Dedicated Build Directory: Run the oe-init-build-env script to create a fresh build directory that you use exclusively for running the AUH utility:
$ cd ~/poky $ source oe-init-build-env your_AUH_build_directory
Re-using an existing build directory and its configurations is not recommended as existing settings could cause AUH to fail or behave undesirably.
Make Configurations in Your Local Configuration File: Several settings need to exist in the
local.conffile in the build directory you just created for AUH. Make these following configurations:If you want to enable Build History, which is optional, you need the following lines in the
conf/local.conffile:INHERIT =+ "buildhistory" BUILDHISTORY_COMMIT = "1"
With this configuration and a successful upgrade, a build history “diff” file appears in the
upgrade-helper/work/recipe/buildhistory-diff.txtfile found in your build directory.If you want to enable testing through the testimage class, which is optional, you need to have the following set in your
conf/local.conffile:INHERIT += "testimage"
Note
If your distro does not enable by default ptest, which Poky does, you need the following in your
local.conffile:DISTRO_FEATURES_append = " ptest"
Optionally Start a vncserver: If you are running in a server without an X11 session, you need to start a vncserver:
$ vncserver :1 $ export DISPLAY=:1
Create and Edit an AUH Configuration File: You need to have the
upgrade-helper/upgrade-helper.confconfiguration file in your build directory. You can find a sample configuration file in the AUH source repository.Read through the sample file and make configurations as needed. For example, if you enabled build history in your
local.confas described earlier, you must enable it inupgrade-helper.conf.Also, if you are using the default
maintainers.incfile supplied with Poky and located inmeta-yoctoand you do not set a “maintainers_whitelist” or “global_maintainer_override” in theupgrade-helper.confconfiguration, and you specify “-e all” on the AUH command-line, the utility automatically sends out emails to all the default maintainers. Please avoid this.
This next set of examples describes how to use the AUH:
Upgrading a Specific Recipe: To upgrade a specific recipe, use the following form:
$ upgrade-helper.py recipe_name
For example, this command upgrades the
xmodmaprecipe:$ upgrade-helper.py xmodmap
Upgrading a Specific Recipe to a Particular Version: To upgrade a specific recipe to a particular version, use the following form:
$ upgrade-helper.py recipe_name -t version
For example, this command upgrades the
xmodmaprecipe to version 1.2.3:$ upgrade-helper.py xmodmap -t 1.2.3
Upgrading all Recipes to the Latest Versions and Suppressing Email Notifications: To upgrade all recipes to their most recent versions and suppress the email notifications, use the following command:
$ upgrade-helper.py all
Upgrading all Recipes to the Latest Versions and Send Email Notifications: To upgrade all recipes to their most recent versions and send email messages to maintainers for each attempted recipe as well as a status email, use the following command:
$ upgrade-helper.py -e all
Once you have run the AUH utility, you can find the results in the AUH build directory:
${BUILDDIR}/upgrade-helper/timestamp
The AUH utility also creates recipe update commits from successful upgrade attempts in the layer tree.
You can easily set up to run the AUH utility on a regular basis by using a cron job. See the weeklyjob.sh file distributed with the utility for an example.
3.5.2 Using devtool upgrade
As mentioned earlier, an alternative method for upgrading recipes to
newer versions is to use
devtool upgrade.
You can read about devtool upgrade in general in the
“Use devtool upgrade to Create a Version of the Recipe that Supports a Newer Version of the Software”
section in the Yocto Project Application Development and the Extensible
Software Development Kit (eSDK) Manual.
To see all the command-line options available with devtool upgrade,
use the following help command:
$ devtool upgrade -h
If you want to find out what version a recipe is currently at upstream without any attempt to upgrade your local version of the recipe, you can use the following command:
$ devtool latest-version recipe_name
As mentioned in the previous section describing AUH, devtool upgrade
works in a less-automated manner than AUH. Specifically,
devtool upgrade only works on a single recipe that you name on the
command line, cannot perform build and integration testing using images,
and does not automatically generate commits for changes in the source
tree. Despite all these “limitations”, devtool upgrade updates the
recipe file to the new upstream version and attempts to rebase custom
patches contained by the recipe as needed.
Note
AUH uses much of devtool upgrade behind the scenes making AUH somewhat
of a “wrapper” application for devtool upgrade.
A typical scenario involves having used Git to clone an upstream
repository that you use during build operations. Because you have built the
recipe in the past, the layer is likely added to your
configuration already. If for some reason, the layer is not added, you
could add it easily using the
“bitbake-layers”
script. For example, suppose you use the nano.bb recipe from the
meta-oe layer in the meta-openembedded repository. For this
example, assume that the layer has been cloned into following area:
/home/scottrif/meta-openembedded
The following command from your
Build Directory adds the layer to
your build configuration (i.e. ${BUILDDIR}/conf/bblayers.conf):
$ bitbake-layers add-layer /home/scottrif/meta-openembedded/meta-oe
NOTE: Starting bitbake server...
Parsing recipes: 100% |##########################################| Time: 0:00:55
Parsing of 1431 .bb files complete (0 cached, 1431 parsed). 2040 targets, 56 skipped, 0 masked, 0 errors.
Removing 12 recipes from the x86_64 sysroot: 100% |##############| Time: 0:00:00
Removing 1 recipes from the x86_64_i586 sysroot: 100% |##########| Time: 0:00:00
Removing 5 recipes from the i586 sysroot: 100% |#################| Time: 0:00:00
Removing 5 recipes from the qemux86 sysroot: 100% |##############| Time: 0:00:00
For this example, assume that the nano.bb recipe that
is upstream has a 2.9.3 version number. However, the version in the
local repository is 2.7.4. The following command from your build
directory automatically upgrades the recipe for you:
Note
Using the -V option is not necessary. Omitting the version number causes
devtool upgrade to upgrade the recipe to the most recent version.
$ devtool upgrade nano -V 2.9.3
NOTE: Starting bitbake server...
NOTE: Creating workspace layer in /home/scottrif/poky/build/workspace
Parsing recipes: 100% |##########################################| Time: 0:00:46
Parsing of 1431 .bb files complete (0 cached, 1431 parsed). 2040 targets, 56 skipped, 0 masked, 0 errors.
NOTE: Extracting current version source...
NOTE: Resolving any missing task queue dependencies
.
.
.
NOTE: Executing SetScene Tasks
NOTE: Executing RunQueue Tasks
NOTE: Tasks Summary: Attempted 74 tasks of which 72 didn't need to be rerun and all succeeded.
Adding changed files: 100% |#####################################| Time: 0:00:00
NOTE: Upgraded source extracted to /home/scottrif/poky/build/workspace/sources/nano
NOTE: New recipe is /home/scottrif/poky/build/workspace/recipes/nano/nano_2.9.3.bb
Continuing with this example, you can use devtool build to build the
newly upgraded recipe:
$ devtool build nano
NOTE: Starting bitbake server...
Loading cache: 100% |################################################################################################| Time: 0:00:01
Loaded 2040 entries from dependency cache.
Parsing recipes: 100% |##############################################################################################| Time: 0:00:00
Parsing of 1432 .bb files complete (1431 cached, 1 parsed). 2041 targets, 56 skipped, 0 masked, 0 errors.
NOTE: Resolving any missing task queue dependencies
.
.
.
NOTE: Executing SetScene Tasks
NOTE: Executing RunQueue Tasks
NOTE: nano: compiling from external source tree /home/scottrif/poky/build/workspace/sources/nano
NOTE: Tasks Summary: Attempted 520 tasks of which 304 didn't need to be rerun and all succeeded.
Within the devtool upgrade workflow, opportunity
exists to deploy and test your rebuilt software. For this example,
however, running devtool finish cleans up the workspace once the
source in your workspace is clean. This usually means using Git to stage
and submit commits for the changes generated by the upgrade process.
Once the tree is clean, you can clean things up in this example with the
following command from the ${BUILDDIR}/workspace/sources/nano
directory:
$ devtool finish nano meta-oe
NOTE: Starting bitbake server...
Loading cache: 100% |################################################################################################| Time: 0:00:00
Loaded 2040 entries from dependency cache.
Parsing recipes: 100% |##############################################################################################| Time: 0:00:01
Parsing of 1432 .bb files complete (1431 cached, 1 parsed). 2041 targets, 56 skipped, 0 masked, 0 errors.
NOTE: Adding new patch 0001-nano.bb-Stuff-I-changed-when-upgrading-nano.bb.patch
NOTE: Updating recipe nano_2.9.3.bb
NOTE: Removing file /home/scottrif/meta-openembedded/meta-oe/recipes-support/nano/nano_2.7.4.bb
NOTE: Moving recipe file to /home/scottrif/meta-openembedded/meta-oe/recipes-support/nano
NOTE: Leaving source tree /home/scottrif/poky/build/workspace/sources/nano as-is; if you no longer need it then please delete it manually
Using the devtool finish command cleans up the workspace and creates a patch
file based on your commits. The tool puts all patch files back into the
source directory in a sub-directory named nano in this case.
3.5.3 Manually Upgrading a Recipe
If for some reason you choose not to upgrade recipes using Using the Auto Upgrade Helper (AUH) or by Using devtool upgrade, you can manually edit the recipe files to upgrade the versions.
Note
Manually updating multiple recipes scales poorly and involves many
steps. The recommendation to upgrade recipe versions is through AUH
or devtool upgrade, both of which automate some steps and provide
guidance for others needed for the manual process.
To manually upgrade recipe versions, follow these general steps:
Change the Version: Rename the recipe such that the version (i.e. the PV part of the recipe name) changes appropriately. If the version is not part of the recipe name, change the value as it is set for
PVwithin the recipe itself.Update
SRCREVif Needed: If the source code your recipe builds is fetched from Git or some other version control system, update SRCREV to point to the commit hash that matches the new version.Build the Software: Try to build the recipe using BitBake. Typical build failures include the following:
License statements were updated for the new version. For this case, you need to review any changes to the license and update the values of LICENSE and LIC_FILES_CHKSUM as needed.
Note
License changes are often inconsequential. For example, the license text’s copyright year might have changed.
Custom patches carried by the older version of the recipe might fail to apply to the new version. For these cases, you need to review the failures. Patches might not be necessary for the new version of the software if the upgraded version has fixed those issues. If a patch is necessary and failing, you need to rebase it into the new version.
Optionally Attempt to Build for Several Architectures: Once you successfully build the new software for a given architecture, you could test the build for other architectures by changing the MACHINE variable and rebuilding the software. This optional step is especially important if the recipe is to be released publicly.
Check the Upstream Change Log or Release Notes: Checking both these reveals if new features exist that could break backwards-compatibility. If so, you need to take steps to mitigate or eliminate that situation.
Optionally Create a Bootable Image and Test: If you want, you can test the new software by booting it onto actual hardware.
Create a Commit with the Change in the Layer Repository: After all builds work and any testing is successful, you can create commits for any changes in the layer holding your upgraded recipe.
3.6 Finding Temporary Source Code
You might find it helpful during development to modify the temporary source code used by recipes to build packages. For example, suppose you are developing a patch and you need to experiment a bit to figure out your solution. After you have initially built the package, you can iteratively tweak the source code, which is located in the Build Directory, and then you can force a re-compile and quickly test your altered code. Once you settle on a solution, you can then preserve your changes in the form of patches.
During a build, the unpacked temporary source code used by recipes to
build packages is available in the Build Directory as defined by the
S variable. Below is the default
value for the S variable as defined in the
meta/conf/bitbake.conf configuration file in the
Source Directory:
S = "${WORKDIR}/${BP}"
You should be aware that many recipes override the
S variable. For example, recipes that fetch their source from Git
usually set S to ${WORKDIR}/git.
Note
The BP represents the base recipe name, which consists of the name and version:
BP = "${BPN}-${PV}"
The path to the work directory for the recipe (WORKDIR) is defined as follows:
${TMPDIR}/work/${MULTIMACH_TARGET_SYS}/${PN}/${EXTENDPE}${PV}-${PR}
The actual directory depends on several things:
TMPDIR: The top-level build output directory.
MULTIMACH_TARGET_SYS: The target system identifier.
PN: The recipe name.
EXTENDPE: The epoch - (if PE is not specified, which is usually the case for most recipes, then
EXTENDPEis blank).PV: The recipe version.
PR: The recipe revision.
As an example, assume a Source Directory top-level folder named
poky, a default Build Directory at poky/build, and a
qemux86-poky-linux machine target system. Furthermore, suppose your
recipe is named foo_1.3.0.bb. In this case, the work directory the
build system uses to build the package would be as follows:
poky/build/tmp/work/qemux86-poky-linux/foo/1.3.0-r0
3.7 Using Quilt in Your Workflow
Quilt is a powerful tool that allows you to capture source code changes without having a clean source tree. This section outlines the typical workflow you can use to modify source code, test changes, and then preserve the changes in the form of a patch all using Quilt.
Note
With regard to preserving changes to source files, if you clean a
recipe or have rm_work enabled, the
devtool workflow
as described in the Yocto Project Application Development and the
Extensible Software Development Kit (eSDK) manual is a safer
development flow than the flow that uses Quilt.
Follow these general steps:
Find the Source Code: Temporary source code used by the OpenEmbedded build system is kept in the Build Directory. See the “Finding Temporary Source Code” section to learn how to locate the directory that has the temporary source code for a particular package.
Change Your Working Directory: You need to be in the directory that has the temporary source code. That directory is defined by the S variable.
Create a New Patch: Before modifying source code, you need to create a new patch. To create a new patch file, use
quilt newas below:$ quilt new my_changes.patch
Notify Quilt and Add Files: After creating the patch, you need to notify Quilt about the files you plan to edit. You notify Quilt by adding the files to the patch you just created:
$ quilt add file1.c file2.c file3.c
Edit the Files: Make your changes in the source code to the files you added to the patch.
Test Your Changes: Once you have modified the source code, the easiest way to test your changes is by calling the
do_compiletask as shown in the following example:$ bitbake -c compile -f package
The
-for--forceoption forces the specified task to execute. If you find problems with your code, you can just keep editing and re-testing iteratively until things work as expected.Note
All the modifications you make to the temporary source code disappear once you run the
do_cleanordo_cleanalltasks using BitBake (i.e.bitbake -c clean packageandbitbake -c cleanall package). Modifications will also disappear if you use therm_workfeature as described in the “Conserving Disk Space During Builds” section.Generate the Patch: Once your changes work as expected, you need to use Quilt to generate the final patch that contains all your modifications.
$ quilt refresh
At this point, the
my_changes.patchfile has all your edits made to thefile1.c,file2.c, andfile3.cfiles.You can find the resulting patch file in the
patches/subdirectory of the source (S) directory.Copy the Patch File: For simplicity, copy the patch file into a directory named
files, which you can create in the same directory that holds the recipe (.bb) file or the append (.bbappend) file. Placing the patch here guarantees that the OpenEmbedded build system will find the patch. Next, add the patch into theSRC_URIof the recipe. Here is an example:SRC_URI += "file://my_changes.patch"
3.8 Using a Development Shell
When debugging certain commands or even when just editing packages,
devshell can be a useful tool. When you invoke devshell, all
tasks up to and including
do_patch are run for the
specified target. Then, a new terminal is opened and you are placed in
${S}, the source
directory. In the new terminal, all the OpenEmbedded build-related
environment variables are still defined so you can use commands such as
configure and make. The commands execute just as if the
OpenEmbedded build system were executing them. Consequently, working
this way can be helpful when debugging a build or preparing software to
be used with the OpenEmbedded build system.
Following is an example that uses devshell on a target named
matchbox-desktop:
$ bitbake matchbox-desktop -c devshell
This command spawns a terminal with a shell prompt within the OpenEmbedded build environment. The OE_TERMINAL variable controls what type of shell is opened.
For spawned terminals, the following occurs:
The
PATHvariable includes the cross-toolchain.The
pkgconfigvariables find the correct.pcfiles.The
configurecommand finds the Yocto Project site files as well as any other necessary files.
Within this environment, you can run configure or compile commands as if they were being run by the OpenEmbedded build system itself. As noted earlier, the working directory also automatically changes to the Source Directory (S).
To manually run a specific task using devshell, run the
corresponding run.* script in the
${WORKDIR}/temp
directory (e.g., run.do_configure.pid). If a task’s script does
not exist, which would be the case if the task was skipped by way of the
sstate cache, you can create the task by first running it outside of the
devshell:
$ bitbake -c task
Note
Execution of a task’s
run.*script and BitBake’s execution of a task are identical. In other words, running the script re-runs the task just as it would be run using thebitbake -ccommand.Any
run.*file that does not have a.pidextension is a symbolic link (symlink) to the most recent version of that file.
Remember, that the devshell is a mechanism that allows you to get
into the BitBake task execution environment. And as such, all commands
must be called just as BitBake would call them. That means you need to
provide the appropriate options for cross-compilation and so forth as
applicable.
When you are finished using devshell, exit the shell or close the
terminal window.
Note
It is worth remembering that when using
devshellyou need to use the full compiler name such asarm-poky-linux-gnueabi-gccinstead of just usinggcc. The same applies to other applications such asbinutils,libtooland so forth. BitBake sets up environment variables such asCCto assist applications, such asmaketo find the correct tools.It is also worth noting that
devshellstill works over X11 forwarding and similar situations.
3.9 Using a Development Python Shell
Similar to working within a development shell as described in the
previous section, you can also spawn and work within an interactive
Python development shell. When debugging certain commands or even when
just editing packages, devpyshell can be a useful tool. When you
invoke devpyshell, all tasks up to and including
do_patch are run for the
specified target. Then a new terminal is opened. Additionally, key
Python objects and code are available in the same way they are to
BitBake tasks, in particular, the data store ‘d’. So, commands such as
the following are useful when exploring the data store and running
functions:
pydevshell> d.getVar("STAGING_DIR")
'/media/build1/poky/build/tmp/sysroots'
pydevshell> d.getVar("STAGING_DIR")
'${TMPDIR}/sysroots'
pydevshell> d.setVar("FOO", "bar")
pydevshell> d.getVar("FOO")
'bar'
pydevshell> d.delVar("FOO")
pydevshell> d.getVar("FOO")
pydevshell> bb.build.exec_func("do_unpack", d)
pydevshell>
The commands execute just as if the OpenEmbedded build system were executing them. Consequently, working this way can be helpful when debugging a build or preparing software to be used with the OpenEmbedded build system.
Following is an example that uses devpyshell on a target named
matchbox-desktop:
$ bitbake matchbox-desktop -c devpyshell
This command spawns a terminal and places you in an interactive Python interpreter within the OpenEmbedded build environment. The OE_TERMINAL variable controls what type of shell is opened.
When you are finished using devpyshell, you can exit the shell
either by using Ctrl+d or closing the terminal window.
3.10 Building
This section describes various build procedures. For example, the steps needed for a simple build, a target that uses multiple configurations, building an image for more than one machine, and so forth.
3.10.1 Building a Simple Image
In the development environment, you need to build an image whenever you change hardware support, add or change system libraries, or add or change services that have dependencies. Several methods exist that allow you to build an image within the Yocto Project. This section presents the basic steps you need to build a simple image using BitBake from a build host running Linux.
Note
For information on how to build an image using Toaster, see the Toaster User Manual.
For information on how to use
devtoolto build images, see the “Using devtool in Your SDK Workflow” section in the Yocto Project Application Development and the Extensible Software Development Kit (eSDK) manual.For a quick example on how to build an image using the OpenEmbedded build system, see the Yocto Project Quick Build document.
The build process creates an entire Linux distribution from source and
places it in your Build Directory under
tmp/deploy/images. For detailed information on the build process
using BitBake, see the “Images” section in the
Yocto Project Overview and Concepts Manual.
The following figure and list overviews the build process:
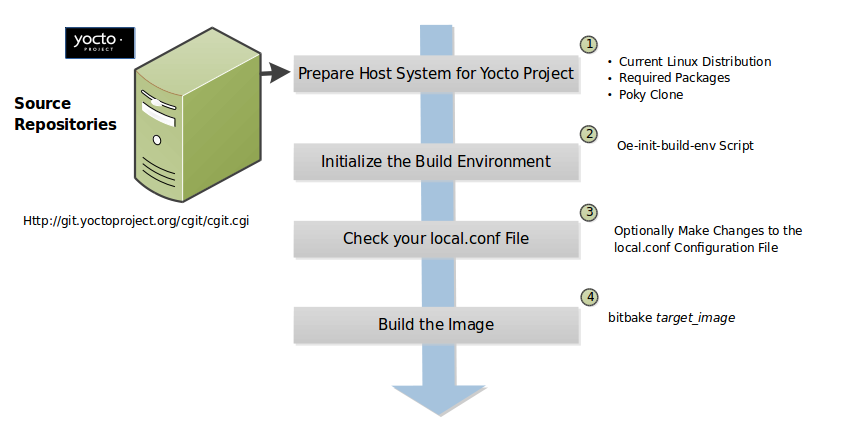
Set up Your Host Development System to Support Development Using the Yocto Project: See the “Setting Up to Use the Yocto Project” section for options on how to get a build host ready to use the Yocto Project.
Initialize the Build Environment: Initialize the build environment by sourcing the build environment script (i.e. oe-init-build-env):
$ source oe-init-build-env [build_dir]
When you use the initialization script, the OpenEmbedded build system uses
buildas the default Build Directory in your current work directory. You can use a build_dir argument with the script to specify a different build directory.Note
A common practice is to use a different Build Directory for different targets. For example,
~/build/x86for aqemux86target, and~/build/armfor aqemuarmtarget.Make Sure Your
local.confFile is Correct: Ensure theconf/local.confconfiguration file, which is found in the Build Directory, is set up how you want it. This file defines many aspects of the build environment including the target machine architecture through theMACHINEvariable, the packaging format used during the build (PACKAGE_CLASSES), and a centralized tarball download directory through the DL_DIR variable.Build the Image: Build the image using the
bitbakecommand:$ bitbake target
Note
For information on BitBake, see the BitBake User Manual.
The target is the name of the recipe you want to build. Common targets are the images in
meta/recipes-core/images,meta/recipes-sato/images, and so forth all found in the Source Directory. Or, the target can be the name of a recipe for a specific piece of software such as BusyBox. For more details about the images the OpenEmbedded build system supports, see the “Images” chapter in the Yocto Project Reference Manual.As an example, the following command builds the
core-image-minimalimage:$ bitbake core-image-minimal
Once an image has been built, it often needs to be installed. The images and kernels built by the OpenEmbedded build system are placed in the Build Directory in
tmp/deploy/images. For information on how to run pre-built images such asqemux86andqemuarm, see the Yocto Project Application Development and the Extensible Software Development Kit (eSDK) manual. For information about how to install these images, see the documentation for your particular board or machine.
3.10.2 Building Images for Multiple Targets Using Multiple Configurations
You can use a single bitbake command to build multiple images or
packages for different targets where each image or package requires a
different configuration (multiple configuration builds). The builds, in
this scenario, are sometimes referred to as “multiconfigs”, and this
section uses that term throughout.
This section describes how to set up for multiple configuration builds and how to account for cross-build dependencies between the multiconfigs.
3.10.2.1 Setting Up and Running a Multiple Configuration Build
To accomplish a multiple configuration build, you must define each
target’s configuration separately using a parallel configuration file in
the Build Directory, and you
must follow a required file hierarchy. Additionally, you must enable the
multiple configuration builds in your local.conf file.
Follow these steps to set up and execute multiple configuration builds:
Create Separate Configuration Files: You need to create a single configuration file for each build target (each multiconfig). Minimally, each configuration file must define the machine and the temporary directory BitBake uses for the build. Suggested practice dictates that you do not overlap the temporary directories used during the builds. However, it is possible that you can share the temporary directory (TMPDIR). For example, consider a scenario with two different multiconfigs for the same MACHINE: “qemux86” built for two distributions such as “poky” and “poky-lsb”. In this case, you might want to use the same
TMPDIR.Here is an example showing the minimal statements needed in a configuration file for a “qemux86” target whose temporary build directory is
tmpmultix86:MACHINE = "qemux86" TMPDIR = "${TOPDIR}/tmpmultix86"
The location for these multiconfig configuration files is specific. They must reside in the current build directory in a sub-directory of
confnamedmulticonfig. Following is an example that defines two configuration files for the “x86” and “arm” multiconfigs: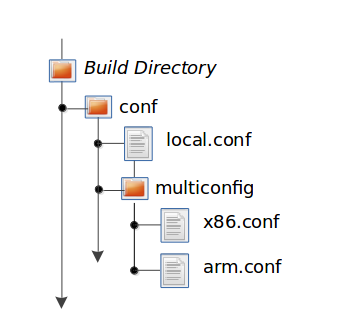
The reason for this required file hierarchy is because the
BBPATHvariable is not constructed until the layers are parsed. Consequently, using the configuration file as a pre-configuration file is not possible unless it is located in the current working directory.Add the BitBake Multi-configuration Variable to the Local Configuration File: Use the BBMULTICONFIG variable in your
conf/local.confconfiguration file to specify each multiconfig. Continuing with the example from the previous figure, theBBMULTICONFIGvariable needs to enable two multiconfigs: “x86” and “arm” by specifying each configuration file:BBMULTICONFIG = "x86 arm"
Note
A “default” configuration already exists by definition. This configuration is named: “” (i.e. empty string) and is defined by the variables coming from your
local.conffile. Consequently, the previous example actually adds two additional configurations to your build: “arm” and “x86” along with “”.Launch BitBake: Use the following BitBake command form to launch the multiple configuration build:
$ bitbake [mc:multiconfigname:]target [[[mc:multiconfigname:]target] ... ]
For the example in this section, the following command applies:
$ bitbake mc:x86:core-image-minimal mc:arm:core-image-sato mc::core-image-base
The previous BitBake command builds a
core-image-minimalimage that is configured through thex86.confconfiguration file, acore-image-satoimage that is configured through thearm.confconfiguration file and acore-image-basethat is configured through yourlocal.confconfiguration file.
Note
Support for multiple configuration builds in the Yocto Project 3.1.5
(Dunfell) Release does not include Shared State (sstate)
optimizations. Consequently, if a build uses the same object twice
in, for example, two different TMPDIR
directories, the build either loads from an existing sstate cache for
that build at the start or builds the object fresh.
3.10.2.2 Enabling Multiple Configuration Build Dependencies
Sometimes dependencies can exist between targets (multiconfigs) in a
multiple configuration build. For example, suppose that in order to
build a core-image-sato image for an “x86” multiconfig, the root
filesystem of an “arm” multiconfig must exist. This dependency is
essentially that the
do_image task in the
core-image-sato recipe depends on the completion of the
do_rootfs task of the
core-image-minimal recipe.
To enable dependencies in a multiple configuration build, you must declare the dependencies in the recipe using the following statement form:
task_or_package[mcdepends] = "mc:from_multiconfig:to_multiconfig:recipe_name:task_on_which_to_depend"
To better show how to use this statement, consider the example scenario
from the first paragraph of this section. The following statement needs
to be added to the recipe that builds the core-image-sato image:
do_image[mcdepends] = "mc:x86:arm:core-image-minimal:do_rootfs"
In this example, the from_multiconfig is “x86”. The to_multiconfig is “arm”. The
task on which the do_image task in the recipe depends is the
do_rootfs task from the core-image-minimal recipe associated
with the “arm” multiconfig.
Once you set up this dependency, you can build the “x86” multiconfig using a BitBake command as follows:
$ bitbake mc:x86:core-image-sato
This command executes all the tasks needed to create the
core-image-sato image for the “x86” multiconfig. Because of the
dependency, BitBake also executes through the do_rootfs task for the
“arm” multiconfig build.
Having a recipe depend on the root filesystem of another build might not
seem that useful. Consider this change to the statement in the
core-image-sato recipe:
do_image[mcdepends] = "mc:x86:arm:core-image-minimal:do_image"
In this case, BitBake must
create the core-image-minimal image for the “arm” build since the
“x86” build depends on it.
Because “x86” and “arm” are enabled for multiple configuration builds and have separate configuration files, BitBake places the artifacts for each build in the respective temporary build directories (i.e. TMPDIR).
3.10.3 Building an Initial RAM Filesystem (initramfs) Image
An initial RAM filesystem (initramfs) image provides a temporary root filesystem used for early system initialization (e.g. loading of modules needed to locate and mount the “real” root filesystem).
Note
The initramfs image is the successor of initial RAM disk (initrd). It is a “copy in and out” (cpio) archive of the initial filesystem that gets loaded into memory during the Linux startup process. Because Linux uses the contents of the archive during initialization, the initramfs image needs to contain all of the device drivers and tools needed to mount the final root filesystem.
Follow these steps to create an initramfs image:
Create the initramfs Image Recipe: You can reference the
core-image-minimal-initramfs.bbrecipe found in themeta/recipes-coredirectory of the Source Directory as an example from which to work.Decide if You Need to Bundle the initramfs Image Into the Kernel Image: If you want the initramfs image that is built to be bundled in with the kernel image, set the INITRAMFS_IMAGE_BUNDLE variable to “1” in your
local.confconfiguration file and set the INITRAMFS_IMAGE variable in the recipe that builds the kernel image.Note
It is recommended that you do bundle the initramfs image with the kernel image to avoid circular dependencies between the kernel recipe and the initramfs recipe should the initramfs image include kernel modules.
Setting the
INITRAMFS_IMAGE_BUNDLEflag causes the initramfs image to be unpacked into the${B}/usr/directory. The unpacked initramfs image is then passed to the kernel’sMakefileusing the CONFIG_INITRAMFS_SOURCE variable, allowing the initramfs image to be built into the kernel normally.Note
If you choose to not bundle the initramfs image with the kernel image, you are essentially using an Initial RAM Disk (initrd). Creating an initrd is handled primarily through the INITRD_IMAGE,
INITRD_LIVE, andINITRD_IMAGE_LIVEvariables. For more information, see the image-live.bbclass file.Optionally Add Items to the initramfs Image Through the initramfs Image Recipe: If you add items to the initramfs image by way of its recipe, you should use PACKAGE_INSTALL rather than IMAGE_INSTALL.
PACKAGE_INSTALLgives more direct control of what is added to the image as compared to the defaults you might not necessarily want that are set by the image or core-image classes.Build the Kernel Image and the initramfs Image: Build your kernel image using BitBake. Because the initramfs image recipe is a dependency of the kernel image, the initramfs image is built as well and bundled with the kernel image if you used the INITRAMFS_IMAGE_BUNDLE variable described earlier.
3.10.4 Building a Tiny System
Very small distributions have some significant advantages such as requiring less on-die or in-package memory (cheaper), better performance through efficient cache usage, lower power requirements due to less memory, faster boot times, and reduced development overhead. Some real-world examples where a very small distribution gives you distinct advantages are digital cameras, medical devices, and small headless systems.
This section presents information that shows you how you can trim your
distribution to even smaller sizes than the poky-tiny distribution,
which is around 5 Mbytes, that can be built out-of-the-box using the
Yocto Project.
3.10.4.1 Tiny System Overview
The following list presents the overall steps you need to consider and perform to create distributions with smaller root filesystems, achieve faster boot times, maintain your critical functionality, and avoid initial RAM disks:
3.10.4.2 Goals and Guiding Principles
Before you can reach your destination, you need to know where you are going. Here is an example list that you can use as a guide when creating very small distributions:
Determine how much space you need (e.g. a kernel that is 1 Mbyte or less and a root filesystem that is 3 Mbytes or less).
Find the areas that are currently taking 90% of the space and concentrate on reducing those areas.
Do not create any difficult “hacks” to achieve your goals.
Leverage the device-specific options.
Work in a separate layer so that you keep changes isolated. For information on how to create layers, see the “Understanding and Creating Layers” section.
3.10.4.3 Understand What Contributes to Your Image Size
It is easiest to have something to start with when creating your own
distribution. You can use the Yocto Project out-of-the-box to create the
poky-tiny distribution. Ultimately, you will want to make changes in
your own distribution that are likely modeled after poky-tiny.
Note
To use poky-tiny in your build, set the DISTRO variable in your
local.conf file to “poky-tiny” as described in the
“Creating Your Own Distribution”
section.
Understanding some memory concepts will help you reduce the system size.
Memory consists of static, dynamic, and temporary memory. Static memory
is the TEXT (code), DATA (initialized data in the code), and BSS
(uninitialized data) sections. Dynamic memory represents memory that is
allocated at runtime: stacks, hash tables, and so forth. Temporary
memory is recovered after the boot process. This memory consists of
memory used for decompressing the kernel and for the __init__
functions.
To help you see where you currently are with kernel and root filesystem
sizes, you can use two tools found in the Source Directory
in the
scripts/tiny/ directory:
ksize.py: Reports component sizes for the kernel build objects.dirsize.py: Reports component sizes for the root filesystem.
This next tool and command help you organize configuration fragments and view file dependencies in a human-readable form:
merge_config.sh: Helps you manage configuration files and fragments within the kernel. With this tool, you can merge individual configuration fragments together. The tool allows you to make overrides and warns you of any missing configuration options. The tool is ideal for allowing you to iterate on configurations, create minimal configurations, and create configuration files for different machines without having to duplicate your process.The
merge_config.shscript is part of the Linux Yocto kernel Git repositories (i.e.linux-yocto-3.14,linux-yocto-3.10,linux-yocto-3.8, and so forth) in thescripts/kconfigdirectory.For more information on configuration fragments, see the “Creating Configuration Fragments” section in the Yocto Project Linux Kernel Development Manual.
bitbake -u taskexp -g bitbake_target: Using the BitBake command with these options brings up a Dependency Explorer from which you can view file dependencies. Understanding these dependencies allows you to make informed decisions when cutting out various pieces of the kernel and root filesystem.
3.10.4.4 Trim the Root Filesystem
The root filesystem is made up of packages for booting, libraries, and applications. To change things, you can configure how the packaging happens, which changes the way you build them. You can also modify the filesystem itself or select a different filesystem.
First, find out what is hogging your root filesystem by running the
dirsize.py script from your root directory:
$ cd root-directory-of-image
$ dirsize.py 100000 > dirsize-100k.log
$ cat dirsize-100k.log
You can apply a filter to the script to ignore files under a certain size. The previous example filters out any files below 100 Kbytes. The sizes reported by the tool are uncompressed, and thus will be smaller by a relatively constant factor in a compressed root filesystem. When you examine your log file, you can focus on areas of the root filesystem that take up large amounts of memory.
You need to be sure that what you eliminate does not cripple the functionality you need. One way to see how packages relate to each other is by using the Dependency Explorer UI with the BitBake command:
$ cd image-directory
$ bitbake -u taskexp -g image
Use the interface to select potential packages you wish to eliminate and see their dependency relationships.
When deciding how to reduce the size, get rid of packages that result in
minimal impact on the feature set. For example, you might not need a VGA
display. Or, you might be able to get by with devtmpfs and mdev
instead of udev.
Use your local.conf file to make changes. For example, to eliminate
udev and glib, set the following in the local configuration
file:
VIRTUAL-RUNTIME_dev_manager = ""
Finally, you should consider exactly the type of root filesystem you
need to meet your needs while also reducing its size. For example,
consider cramfs, squashfs, ubifs, ext2, or an
initramfs using initramfs. Be aware that ext3 requires a 1
Mbyte journal. If you are okay with running read-only, you do not need
this journal.
Note
After each round of elimination, you need to rebuild your system and then use the tools to see the effects of your reductions.
3.10.4.5 Trim the Kernel
The kernel is built by including policies for hardware-independent aspects. What subsystems do you enable? For what architecture are you building? Which drivers do you build by default?
Note
You can modify the kernel source if you want to help with boot time.
Run the ksize.py script from the top-level Linux build directory to
get an idea of what is making up the kernel:
$ cd top-level-linux-build-directory
$ ksize.py > ksize.log
$ cat ksize.log
When you examine the log, you will see how much space is taken up with
the built-in .o files for drivers, networking, core kernel files,
filesystem, sound, and so forth. The sizes reported by the tool are
uncompressed, and thus will be smaller by a relatively constant factor
in a compressed kernel image. Look to reduce the areas that are large
and taking up around the “90% rule.”
To examine, or drill down, into any particular area, use the -d
option with the script:
$ ksize.py -d > ksize.log
Using this option breaks out the individual file information for each area of the kernel (e.g. drivers, networking, and so forth).
Use your log file to see what you can eliminate from the kernel based on features you can let go. For example, if you are not going to need sound, you do not need any drivers that support sound.
After figuring out what to eliminate, you need to reconfigure the kernel
to reflect those changes during the next build. You could run
menuconfig and make all your changes at once. However, that makes it
difficult to see the effects of your individual eliminations and also
makes it difficult to replicate the changes for perhaps another target
device. A better method is to start with no configurations using
allnoconfig, create configuration fragments for individual changes,
and then manage the fragments into a single configuration file using
merge_config.sh. The tool makes it easy for you to iterate using the
configuration change and build cycle.
Each time you make configuration changes, you need to rebuild the kernel and check to see what impact your changes had on the overall size.
3.10.4.6 Remove Package Management Requirements
Packaging requirements add size to the image. One way to reduce the size of the image is to remove all the packaging requirements from the image. This reduction includes both removing the package manager and its unique dependencies as well as removing the package management data itself.
To eliminate all the packaging requirements for an image, be sure that “package-management” is not part of your IMAGE_FEATURES statement for the image. When you remove this feature, you are removing the package manager as well as its dependencies from the root filesystem.
3.10.4.7 Look for Other Ways to Minimize Size
Depending on your particular circumstances, other areas that you can trim likely exist. The key to finding these areas is through tools and methods described here combined with experimentation and iteration. Here are a couple of areas to experiment with:
glibc: In general, follow this process:Remove
glibcfeatures from DISTRO_FEATURES that you think you do not need.Build your distribution.
If the build fails due to missing symbols in a package, determine if you can reconfigure the package to not need those features. For example, change the configuration to not support wide character support as is done for
ncurses. Or, if support for those characters is needed, determine whatglibcfeatures provide the support and restore the configuration.Rebuild and repeat the process.
busybox: For BusyBox, use a process similar as described forglibc. A difference is you will need to boot the resulting system to see if you are able to do everything you expect from the running system. You need to be sure to integrate configuration fragments into Busybox because BusyBox handles its own core features and then allows you to add configuration fragments on top.
3.10.4.8 Iterate on the Process
If you have not reached your goals on system size, you need to iterate on the process. The process is the same. Use the tools and see just what is taking up 90% of the root filesystem and the kernel. Decide what you can eliminate without limiting your device beyond what you need.
Depending on your system, a good place to look might be Busybox, which provides a stripped down version of Unix tools in a single, executable file. You might be able to drop virtual terminal services or perhaps ipv6.
3.10.5 Building Images for More than One Machine
A common scenario developers face is creating images for several different machines that use the same software environment. In this situation, it is tempting to set the tunings and optimization flags for each build specifically for the targeted hardware (i.e. “maxing out” the tunings). Doing so can considerably add to build times and package feed maintenance collectively for the machines. For example, selecting tunes that are extremely specific to a CPU core used in a system might enable some micro optimizations in GCC for that particular system but would otherwise not gain you much of a performance difference across the other systems as compared to using a more general tuning across all the builds (e.g. setting DEFAULTTUNE specifically for each machine’s build). Rather than “max out” each build’s tunings, you can take steps that cause the OpenEmbedded build system to reuse software across the various machines where it makes sense.
If build speed and package feed maintenance are considerations, you should consider the points in this section that can help you optimize your tunings to best consider build times and package feed maintenance.
Share the Build Directory: If at all possible, share the TMPDIR across builds. The Yocto Project supports switching between different MACHINE values in the same
TMPDIR. This practice is well supported and regularly used by developers when building for multiple machines. When you use the sameTMPDIRfor multiple machine builds, the OpenEmbedded build system can reuse the existing native and often cross-recipes for multiple machines. Thus, build time decreases.Note
If DISTRO settings change or fundamental configuration settings such as the filesystem layout, you need to work with a clean
TMPDIR. SharingTMPDIRunder these circumstances might work but since it is not guaranteed, you should use a cleanTMPDIR.Enable the Appropriate Package Architecture: By default, the OpenEmbedded build system enables three levels of package architectures: “all”, “tune” or “package”, and “machine”. Any given recipe usually selects one of these package architectures (types) for its output. Depending for what a given recipe creates packages, making sure you enable the appropriate package architecture can directly impact the build time.
A recipe that just generates scripts can enable “all” architecture because there are no binaries to build. To specifically enable “all” architecture, be sure your recipe inherits the allarch class. This class is useful for “all” architectures because it configures many variables so packages can be used across multiple architectures.
If your recipe needs to generate packages that are machine-specific or when one of the build or runtime dependencies is already machine-architecture dependent, which makes your recipe also machine-architecture dependent, make sure your recipe enables the “machine” package architecture through the MACHINE_ARCH variable:
PACKAGE_ARCH = "${MACHINE_ARCH}"
When you do not specifically enable a package architecture through the PACKAGE_ARCH, The OpenEmbedded build system defaults to the TUNE_PKGARCH setting:
PACKAGE_ARCH = "${TUNE_PKGARCH}"
Choose a Generic Tuning File if Possible: Some tunes are more generic and can run on multiple targets (e.g. an
armv5set of packages could run onarmv6andarmv7processors in most cases). Similarly,i486binaries could work oni586and higher processors. You should realize, however, that advances on newer processor versions would not be used.If you select the same tune for several different machines, the OpenEmbedded build system reuses software previously built, thus speeding up the overall build time. Realize that even though a new sysroot for each machine is generated, the software is not recompiled and only one package feed exists.
Manage Granular Level Packaging: Sometimes cases exist where injecting another level of package architecture beyond the three higher levels noted earlier can be useful. For example, consider how NXP (formerly Freescale) allows for the easy reuse of binary packages in their layer meta-freescale. In this example, the fsl-dynamic-packagearch class shares GPU packages for i.MX53 boards because all boards share the AMD GPU. The i.MX6-based boards can do the same because all boards share the Vivante GPU. This class inspects the BitBake datastore to identify if the package provides or depends on one of the sub-architecture values. If so, the class sets the PACKAGE_ARCH value based on the
MACHINE_SUBARCHvalue. If the package does not provide or depend on one of the sub-architecture values but it matches a value in the machine-specific filter, it sets MACHINE_ARCH. This behavior reduces the number of packages built and saves build time by reusing binaries.Use Tools to Debug Issues: Sometimes you can run into situations where software is being rebuilt when you think it should not be. For example, the OpenEmbedded build system might not be using shared state between machines when you think it should be. These types of situations are usually due to references to machine-specific variables such as MACHINE, SERIAL_CONSOLES, XSERVER, MACHINE_FEATURES, and so forth in code that is supposed to only be tune-specific or when the recipe depends (DEPENDS, RDEPENDS, RRECOMMENDS, RSUGGESTS, and so forth) on some other recipe that already has PACKAGE_ARCH defined as “${MACHINE_ARCH}”.
Note
Patches to fix any issues identified are most welcome as these issues occasionally do occur.
For such cases, you can use some tools to help you sort out the situation:
state-diff-machines.sh``*:* You can find this tool in the ``scriptsdirectory of the Source Repositories. See the comments in the script for information on how to use the tool.BitBake’s “-S printdiff” Option: Using this option causes BitBake to try to establish the closest signature match it can (e.g. in the shared state cache) and then run
bitbake-diffsigsover the matches to determine the stamps and delta where these two stamp trees diverge.
3.10.6 Building Software from an External Source
By default, the OpenEmbedded build system uses the Build Directory when building source code. The build process involves fetching the source files, unpacking them, and then patching them if necessary before the build takes place.
Situations exist where you might want to build software from source files that are external to and thus outside of the OpenEmbedded build system. For example, suppose you have a project that includes a new BSP with a heavily customized kernel. And, you want to minimize exposing the build system to the development team so that they can focus on their project and maintain everyone’s workflow as much as possible. In this case, you want a kernel source directory on the development machine where the development occurs. You want the recipe’s SRC_URI variable to point to the external directory and use it as is, not copy it.
To build from software that comes from an external source, all you need
to do is inherit the
externalsrc class
and then set the
EXTERNALSRC variable to
point to your external source code. Here are the statements to put in
your local.conf file:
INHERIT += "externalsrc"
EXTERNALSRC_pn-myrecipe = "path-to-your-source-tree"
This next example shows how to accomplish the same thing by setting
EXTERNALSRC in the recipe itself or in the recipe’s append file:
EXTERNALSRC = "path"
EXTERNALSRC_BUILD = "path"
Note
In order for these settings to take effect, you must globally or locally inherit the externalsrc class.
By default, externalsrc.bbclass builds the source code in a
directory separate from the external source directory as specified by
EXTERNALSRC. If you need
to have the source built in the same directory in which it resides, or
some other nominated directory, you can set
EXTERNALSRC_BUILD
to point to that directory:
EXTERNALSRC_BUILD_pn-myrecipe = "path-to-your-source-tree"
3.10.7 Replicating a Build Offline
It can be useful to take a “snapshot” of upstream sources used in a build and then use that “snapshot” later to replicate the build offline. To do so, you need to first prepare and populate your downloads directory your “snapshot” of files. Once your downloads directory is ready, you can use it at any time and from any machine to replicate your build.
Follow these steps to populate your Downloads directory:
Create a Clean Downloads Directory: Start with an empty downloads directory (DL_DIR). You start with an empty downloads directory by either removing the files in the existing directory or by setting
DL_DIRto point to either an empty location or one that does not yet exist.Generate Tarballs of the Source Git Repositories: Edit your
local.confconfiguration file as follows:DL_DIR = "/home/your-download-dir/" BB_GENERATE_MIRROR_TARBALLS = "1"
During the fetch process in the next step, BitBake gathers the source files and creates tarballs in the directory pointed to by
DL_DIR. See the BB_GENERATE_MIRROR_TARBALLS variable for more information.Populate Your Downloads Directory Without Building: Use BitBake to fetch your sources but inhibit the build:
$ bitbake target --runonly=fetch
The downloads directory (i.e.
${DL_DIR}) now has a “snapshot” of the source files in the form of tarballs, which can be used for the build.Optionally Remove Any Git or other SCM Subdirectories From the Downloads Directory: If you want, you can clean up your downloads directory by removing any Git or other Source Control Management (SCM) subdirectories such as
${DL_DIR}/git2/*. The tarballs already contain these subdirectories.
Once your downloads directory has everything it needs regarding source files, you can create your “own-mirror” and build your target. Understand that you can use the files to build the target offline from any machine and at any time.
Follow these steps to build your target using the files in the downloads directory:
Using Local Files Only: Inside your
local.conffile, add the SOURCE_MIRROR_URL variable, inherit the own-mirrors class, and use the BB_NO_NETWORK variable to yourlocal.conf.SOURCE_MIRROR_URL ?= "file:///home/your-download-dir/" INHERIT += "own-mirrors" BB_NO_NETWORK = "1"
The
SOURCE_MIRROR_URLandown-mirrorclass set up the system to use the downloads directory as your “own mirror”. Using theBB_NO_NETWORKvariable makes sure that BitBake’s fetching process in step 3 stays local, which means files from your “own-mirror” are used.Start With a Clean Build: You can start with a clean build by removing the
${TMPDIR}directory or using a new Build Directory.Build Your Target: Use BitBake to build your target:
$ bitbake target
The build completes using the known local “snapshot” of source files from your mirror. The resulting tarballs for your “snapshot” of source files are in the downloads directory.
Note
The offline build does not work if recipes attempt to find the latest version of software by setting SRCREV to
${AUTOREV}:SRCREV = "${AUTOREV}"
When a recipe sets
SRCREVto${AUTOREV}, the build system accesses the network in an attempt to determine the latest version of software from the SCM. Typically, recipes that useAUTOREVare custom or modified recipes. Recipes that reside in public repositories usually do not useAUTOREV.If you do have recipes that use
AUTOREV, you can take steps to still use the recipes in an offline build. Do the following:Use a configuration generated by enabling build history.
Use the
buildhistory-collect-srcrevscommand to collect the storedSRCREVvalues from the build’s history. For more information on collecting these values, see the “Build History Package Information” section.Once you have the correct source revisions, you can modify those recipes to to set
SRCREVto specific versions of the software.
3.11 Speeding Up a Build
Build time can be an issue. By default, the build system uses simple controls to try and maximize build efficiency. In general, the default settings for all the following variables result in the most efficient build times when dealing with single socket systems (i.e. a single CPU). If you have multiple CPUs, you might try increasing the default values to gain more speed. See the descriptions in the glossary for each variable for more information:
BB_NUMBER_THREADS: The maximum number of threads BitBake simultaneously executes.
BB_NUMBER_PARSE_THREADS: The number of threads BitBake uses during parsing.
PARALLEL_MAKE: Extra options passed to the
makecommand during the do_compile task in order to specify parallel compilation on the local build host.PARALLEL_MAKEINST: Extra options passed to the
makecommand during the do_install task in order to specify parallel installation on the local build host.
As mentioned, these variables all scale to the number of processor cores available on the build system. For single socket systems, this auto-scaling ensures that the build system fundamentally takes advantage of potential parallel operations during the build based on the build machine’s capabilities.
Following are additional factors that can affect build speed:
File system type: The file system type that the build is being performed on can also influence performance. Using
ext4is recommended as compared toext2andext3due toext4improved features such as extents.Disabling the updating of access time using
noatime: Thenoatimemount option prevents the build system from updating file and directory access times.Setting a longer commit: Using the “commit=” mount option increases the interval in seconds between disk cache writes. Changing this interval from the five second default to something longer increases the risk of data loss but decreases the need to write to the disk, thus increasing the build performance.
Choosing the packaging backend: Of the available packaging backends, IPK is the fastest. Additionally, selecting a singular packaging backend also helps.
Using
tmpfsfor TMPDIR as a temporary file system: While this can help speed up the build, the benefits are limited due to the compiler using-pipe. The build system goes to some lengths to avoidsync()calls into the file system on the principle that if there was a significant failure, the Build Directory contents could easily be rebuilt.Inheriting the rm_work class: Inheriting this class has shown to speed up builds due to significantly lower amounts of data stored in the data cache as well as on disk. Inheriting this class also makes cleanup of TMPDIR faster, at the expense of being easily able to dive into the source code. File system maintainers have recommended that the fastest way to clean up large numbers of files is to reformat partitions rather than delete files due to the linear nature of partitions. This, of course, assumes you structure the disk partitions and file systems in a way that this is practical.
Aside from the previous list, you should keep some trade offs in mind that can help you speed up the build:
Remove items from DISTRO_FEATURES that you might not need.
Exclude debug symbols and other debug information: If you do not need these symbols and other debug information, disabling the
*-dbgpackage generation can speed up the build. You can disable this generation by setting the INHIBIT_PACKAGE_DEBUG_SPLIT variable to “1”.Disable static library generation for recipes derived from
autoconforlibtool: Following is an example showing how to disable static libraries and still provide an override to handle exceptions:STATICLIBCONF = "--disable-static" STATICLIBCONF_sqlite3-native = "" EXTRA_OECONF += "${STATICLIBCONF}"
Note
Some recipes need static libraries in order to work correctly (e.g.
pseudo-nativeneedssqlite3-native). Overrides, as in the previous example, account for these kinds of exceptions.Some packages have packaging code that assumes the presence of the static libraries. If so, you might need to exclude them as well.
3.12 Working With Libraries
Libraries are an integral part of your system. This section describes some common practices you might find helpful when working with libraries to build your system:
How to use the Multilib feature to combine multiple versions of library files into a single image
How to install multiple versions of the same library in parallel on the same system
3.12.1 Including Static Library Files
If you are building a library and the library offers static linking, you
can control which static library files (*.a files) get included in
the built library.
The PACKAGES and
FILES_* variables in the
meta/conf/bitbake.conf configuration file define how files installed
by the do_install task are packaged. By default, the PACKAGES
variable includes ${PN}-staticdev, which represents all static
library files.
Note
Some previously released versions of the Yocto Project defined the
static library files through ${PN}-dev.
Following is part of the BitBake configuration file, where you can see how the static library files are defined:
PACKAGE_BEFORE_PN ?= ""
PACKAGES = "${PN}-dbg ${PN}-staticdev ${PN}-dev ${PN}-doc ${PN}-locale ${PACKAGE_BEFORE_PN} ${PN}"
PACKAGES_DYNAMIC = "^${PN}-locale-.*"
FILES = ""
FILES_${PN} = "${bindir}/* ${sbindir}/* ${libexecdir}/* ${libdir}/lib*${SOLIBS} \
${sysconfdir} ${sharedstatedir} ${localstatedir} \
${base_bindir}/* ${base_sbindir}/* \
${base_libdir}/*${SOLIBS} \
${base_prefix}/lib/udev/rules.d ${prefix}/lib/udev/rules.d \
${datadir}/${BPN} ${libdir}/${BPN}/* \
${datadir}/pixmaps ${datadir}/applications \
${datadir}/idl ${datadir}/omf ${datadir}/sounds \
${libdir}/bonobo/servers"
FILES_${PN}-bin = "${bindir}/* ${sbindir}/*"
FILES_${PN}-doc = "${docdir} ${mandir} ${infodir} ${datadir}/gtk-doc \
${datadir}/gnome/help"
SECTION_${PN}-doc = "doc"
FILES_SOLIBSDEV ?= "${base_libdir}/lib*${SOLIBSDEV} ${libdir}/lib*${SOLIBSDEV}"
FILES_${PN}-dev = "${includedir} ${FILES_SOLIBSDEV} ${libdir}/*.la \
${libdir}/*.o ${libdir}/pkgconfig ${datadir}/pkgconfig \
${datadir}/aclocal ${base_libdir}/*.o \
${libdir}/${BPN}/*.la ${base_libdir}/*.la"
SECTION_${PN}-dev = "devel"
ALLOW_EMPTY_${PN}-dev = "1"
RDEPENDS_${PN}-dev = "${PN} (= ${EXTENDPKGV})"
FILES_${PN}-staticdev = "${libdir}/*.a ${base_libdir}/*.a ${libdir}/${BPN}/*.a"
SECTION_${PN}-staticdev = "devel"
RDEPENDS_${PN}-staticdev = "${PN}-dev (= ${EXTENDPKGV})"
3.12.2 Combining Multiple Versions of Library Files into One Image
The build system offers the ability to build libraries with different target optimizations or architecture formats and combine these together into one system image. You can link different binaries in the image against the different libraries as needed for specific use cases. This feature is called “Multilib”.
An example would be where you have most of a system compiled in 32-bit mode using 32-bit libraries, but you have something large, like a database engine, that needs to be a 64-bit application and uses 64-bit libraries. Multilib allows you to get the best of both 32-bit and 64-bit libraries.
While the Multilib feature is most commonly used for 32 and 64-bit differences, the approach the build system uses facilitates different target optimizations. You could compile some binaries to use one set of libraries and other binaries to use a different set of libraries. The libraries could differ in architecture, compiler options, or other optimizations.
Several examples exist in the meta-skeleton layer found in the
Source Directory:
conf/multilib-example.confconfiguration fileconf/multilib-example2.confconfiguration filerecipes-multilib/images/core-image-multilib-example.bbrecipe
3.12.2.1 Preparing to Use Multilib
User-specific requirements drive the Multilib feature. Consequently, there is no one “out-of-the-box” configuration that likely exists to meet your needs.
In order to enable Multilib, you first need to ensure your recipe is
extended to support multiple libraries. Many standard recipes are
already extended and support multiple libraries. You can check in the
meta/conf/multilib.conf configuration file in the
Source Directory to see how this is
done using the
BBCLASSEXTEND variable.
Eventually, all recipes will be covered and this list will not be
needed.
For the most part, the Multilib class extension works automatically to
extend the package name from ${PN} to ${MLPREFIX}${PN}, where
MLPREFIX is the particular multilib (e.g. “lib32-” or “lib64-“).
Standard variables such as
DEPENDS,
RDEPENDS,
RPROVIDES,
RRECOMMENDS,
PACKAGES, and
PACKAGES_DYNAMIC are
automatically extended by the system. If you are extending any manual
code in the recipe, you can use the ${MLPREFIX} variable to ensure
those names are extended correctly. This automatic extension code
resides in multilib.bbclass.
3.12.2.2 Using Multilib
After you have set up the recipes, you need to define the actual
combination of multiple libraries you want to build. You accomplish this
through your local.conf configuration file in the
Build Directory. An example
configuration would be as follows:
MACHINE = "qemux86-64"
require conf/multilib.conf
MULTILIBS = "multilib:lib32"
DEFAULTTUNE_virtclass-multilib-lib32 = "x86"
IMAGE_INSTALL_append = "lib32-glib-2.0"
This example enables an additional library named
lib32 alongside the normal target packages. When combining these
“lib32” alternatives, the example uses “x86” for tuning. For information
on this particular tuning, see
meta/conf/machine/include/ia32/arch-ia32.inc.
The example then includes lib32-glib-2.0 in all the images, which
illustrates one method of including a multiple library dependency. You
can use a normal image build to include this dependency, for example:
$ bitbake core-image-sato
You can also build Multilib packages specifically with a command like this:
$ bitbake lib32-glib-2.0
3.12.2.3 Additional Implementation Details
Generic implementation details as well as details that are specific to package management systems exist. Following are implementation details that exist regardless of the package management system:
The typical convention used for the class extension code as used by Multilib assumes that all package names specified in PACKAGES that contain
${PN}have${PN}at the start of the name. When that convention is not followed and${PN}appears at the middle or the end of a name, problems occur.The TARGET_VENDOR value under Multilib will be extended to “-vendormlmultilib” (e.g. “-pokymllib32” for a “lib32” Multilib with Poky). The reason for this slightly unwieldy contraction is that any “-” characters in the vendor string presently break Autoconf’s
config.sub, and other separators are problematic for different reasons.
For the RPM Package Management System, the following implementation details exist:
A unique architecture is defined for the Multilib packages, along with creating a unique deploy folder under
tmp/deploy/rpmin the Build Directory. For example, considerlib32in aqemux86-64image. The possible architectures in the system are “all”, “qemux86_64”, “lib32_qemux86_64”, and “lib32_x86”.The
${MLPREFIX}variable is stripped from${PN}during RPM packaging. The naming for a normal RPM package and a Multilib RPM package in aqemux86-64system resolves to something similar tobash-4.1-r2.x86_64.rpmandbash-4.1.r2.lib32_x86.rpm, respectively.When installing a Multilib image, the RPM backend first installs the base image and then installs the Multilib libraries.
The build system relies on RPM to resolve the identical files in the two (or more) Multilib packages.
For the IPK Package Management System, the following implementation details exist:
The
${MLPREFIX}is not stripped from${PN}during IPK packaging. The naming for a normal RPM package and a Multilib IPK package in aqemux86-64system resolves to something likebash_4.1-r2.x86_64.ipkandlib32-bash_4.1-rw_x86.ipk, respectively.The IPK deploy folder is not modified with
${MLPREFIX}because packages with and without the Multilib feature can exist in the same folder due to the${PN}differences.IPK defines a sanity check for Multilib installation using certain rules for file comparison, overridden, etc.
3.12.3 Installing Multiple Versions of the Same Library
Situations can exist where you need to install and use multiple versions of the same library on the same system at the same time. These situations almost always exist when a library API changes and you have multiple pieces of software that depend on the separate versions of the library. To accommodate these situations, you can install multiple versions of the same library in parallel on the same system.
The process is straightforward as long as the libraries use proper
versioning. With properly versioned libraries, all you need to do to
individually specify the libraries is create separate, appropriately
named recipes where the PN part of
the name includes a portion that differentiates each library version
(e.g. the major part of the version number). Thus, instead of having a
single recipe that loads one version of a library (e.g. clutter),
you provide multiple recipes that result in different versions of the
libraries you want. As an example, the following two recipes would allow
the two separate versions of the clutter library to co-exist on the
same system:
clutter-1.6_1.6.20.bb
clutter-1.8_1.8.4.bb
Additionally, if
you have other recipes that depend on a given library, you need to use
the DEPENDS variable to
create the dependency. Continuing with the same example, if you want to
have a recipe depend on the 1.8 version of the clutter library, use
the following in your recipe:
DEPENDS = "clutter-1.8"
3.13 Using x32 psABI
x32 processor-specific Application Binary Interface (x32 psABI) is a native 32-bit processor-specific ABI for Intel 64 (x86-64) architectures. An ABI defines the calling conventions between functions in a processing environment. The interface determines what registers are used and what the sizes are for various C data types.
Some processing environments prefer using 32-bit applications even when running on Intel 64-bit platforms. Consider the i386 psABI, which is a very old 32-bit ABI for Intel 64-bit platforms. The i386 psABI does not provide efficient use and access of the Intel 64-bit processor resources, leaving the system underutilized. Now consider the x86_64 psABI. This ABI is newer and uses 64-bits for data sizes and program pointers. The extra bits increase the footprint size of the programs, libraries, and also increases the memory and file system size requirements. Executing under the x32 psABI enables user programs to utilize CPU and system resources more efficiently while keeping the memory footprint of the applications low. Extra bits are used for registers but not for addressing mechanisms.
The Yocto Project supports the final specifications of x32 psABI as follows:
You can create packages and images in x32 psABI format on x86_64 architecture targets.
You can successfully build recipes with the x32 toolchain.
You can create and boot
core-image-minimalandcore-image-satoimages.RPM Package Manager (RPM) support exists for x32 binaries.
Support for large images exists.
To use the x32 psABI, you need to edit your conf/local.conf
configuration file as follows:
MACHINE = "qemux86-64"
DEFAULTTUNE = "x86-64-x32"
baselib = "${@d.getVar('BASE_LIB_tune-' + (d.getVar('DEFAULTTUNE') \
or 'INVALID')) or 'lib'}"
Once you have set up your configuration file, use BitBake to build an image that supports the x32 psABI. Here is an example:
$ bitbake core-image-sato
3.14 Enabling GObject Introspection Support
GObject introspection is the standard mechanism for accessing GObject-based software from runtime environments. GObject is a feature of the GLib library that provides an object framework for the GNOME desktop and related software. GObject Introspection adds information to GObject that allows objects created within it to be represented across different programming languages. If you want to construct GStreamer pipelines using Python, or control UPnP infrastructure using Javascript and GUPnP, GObject introspection is the only way to do it.
This section describes the Yocto Project support for generating and
packaging GObject introspection data. GObject introspection data is a
description of the API provided by libraries built on top of GLib
framework, and, in particular, that framework’s GObject mechanism.
GObject Introspection Repository (GIR) files go to -dev packages,
typelib files go to main packages as they are packaged together with
libraries that are introspected.
The data is generated when building such a library, by linking the library with a small executable binary that asks the library to describe itself, and then executing the binary and processing its output.
Generating this data in a cross-compilation environment is difficult because the library is produced for the target architecture, but its code needs to be executed on the build host. This problem is solved with the OpenEmbedded build system by running the code through QEMU, which allows precisely that. Unfortunately, QEMU does not always work perfectly as mentioned in the “Known Issues” section.
3.14.1 Enabling the Generation of Introspection Data
Enabling the generation of introspection data (GIR files) in your library package involves the following:
Inherit the gobject-introspection class.
Make sure introspection is not disabled anywhere in the recipe or from anything the recipe includes. Also, make sure that “gobject-introspection-data” is not in DISTRO_FEATURES_BACKFILL_CONSIDERED and that “qemu-usermode” is not in MACHINE_FEATURES_BACKFILL_CONSIDERED. If either of these conditions exist, nothing will happen.
Try to build the recipe. If you encounter build errors that look like something is unable to find
.solibraries, check where these libraries are located in the source tree and add the following to the recipe:GIR_EXTRA_LIBS_PATH = "${B}/something/.libs"
Note
See recipes in the
oe-corerepository that use thatGIR_EXTRA_LIBS_PATHvariable as an example.Look for any other errors, which probably mean that introspection support in a package is not entirely standard, and thus breaks down in a cross-compilation environment. For such cases, custom-made fixes are needed. A good place to ask and receive help in these cases is the Yocto Project mailing lists.
Note
Using a library that no longer builds against the latest Yocto Project release and prints introspection related errors is a good candidate for the previous procedure.
3.14.2 Disabling the Generation of Introspection Data
You might find that you do not want to generate introspection data. Or, perhaps QEMU does not work on your build host and target architecture combination. If so, you can use either of the following methods to disable GIR file generations:
Add the following to your distro configuration:
DISTRO_FEATURES_BACKFILL_CONSIDERED = "gobject-introspection-data"
Adding this statement disables generating introspection data using QEMU but will still enable building introspection tools and libraries (i.e. building them does not require the use of QEMU).
Add the following to your machine configuration:
MACHINE_FEATURES_BACKFILL_CONSIDERED = "qemu-usermode"
Adding this statement disables the use of QEMU when building packages for your machine. Currently, this feature is used only by introspection recipes and has the same effect as the previously described option.
Note
Future releases of the Yocto Project might have other features affected by this option.
If you disable introspection data, you can still obtain it through other means such as copying the data from a suitable sysroot, or by generating it on the target hardware. The OpenEmbedded build system does not currently provide specific support for these techniques.
3.14.3 Testing that Introspection Works in an Image
Use the following procedure to test if generating introspection data is working in an image:
Make sure that “gobject-introspection-data” is not in DISTRO_FEATURES_BACKFILL_CONSIDERED and that “qemu-usermode” is not in MACHINE_FEATURES_BACKFILL_CONSIDERED.
Build
core-image-sato.Launch a Terminal and then start Python in the terminal.
Enter the following in the terminal:
>>> from gi.repository import GLib >>> GLib.get_host_name()
For something a little more advanced, enter the following see: https://python-gtk-3-tutorial.readthedocs.io/en/latest/introduction.html
3.14.4 Known Issues
The following know issues exist for GObject Introspection Support:
qemu-ppc64immediately crashes. Consequently, you cannot build introspection data on that architecture.x32 is not supported by QEMU. Consequently, introspection data is disabled.
musl causes transient GLib binaries to crash on assertion failures. Consequently, generating introspection data is disabled.
Because QEMU is not able to run the binaries correctly, introspection is disabled for some specific packages under specific architectures (e.g.
gcr,libsecret, andwebkit).QEMU usermode might not work properly when running 64-bit binaries under 32-bit host machines. In particular, “qemumips64” is known to not work under i686.
3.15 Optionally Using an External Toolchain
You might want to use an external toolchain as part of your development. If this is the case, the fundamental steps you need to accomplish are as follows:
Understand where the installed toolchain resides. For cases where you need to build the external toolchain, you would need to take separate steps to build and install the toolchain.
Make sure you add the layer that contains the toolchain to your
bblayers.conffile through the BBLAYERS variable.Set the
EXTERNAL_TOOLCHAINvariable in yourlocal.conffile to the location in which you installed the toolchain.
A good example of an external toolchain used with the Yocto Project is
Mentor Graphics Sourcery G++ Toolchain. You can see information on how
to use that particular layer in the README file at
https://github.com/MentorEmbedded/meta-sourcery/. You can find
further information by reading about the
TCMODE variable in the Yocto
Project Reference Manual’s variable glossary.
3.16 Creating Partitioned Images Using Wic
Creating an image for a particular hardware target using the OpenEmbedded build system does not necessarily mean you can boot that image as is on your device. Physical devices accept and boot images in various ways depending on the specifics of the device. Usually, information about the hardware can tell you what image format the device requires. Should your device require multiple partitions on an SD card, flash, or an HDD, you can use the OpenEmbedded Image Creator, Wic, to create the properly partitioned image.
The wic command generates partitioned images from existing
OpenEmbedded build artifacts. Image generation is driven by partitioning
commands contained in an Openembedded kickstart file (.wks)
specified either directly on the command line or as one of a selection
of canned kickstart files as shown with the wic list images command
in the “Using an Existing Kickstart
File” section. When you apply the
command to a given set of build artifacts, the result is an image or set
of images that can be directly written onto media and used on a
particular system.
Note
For a kickstart file reference, see the “OpenEmbedded Kickstart (.wks) Reference” Chapter in the Yocto Project Reference Manual.
The wic command and the infrastructure it is based on is by
definition incomplete. The purpose of the command is to allow the
generation of customized images, and as such, was designed to be
completely extensible through a plugin interface. See the “Using the
Wic PlugIn Interface” section
for information on these plugins.
This section provides some background information on Wic, describes what you need to have in place to run the tool, provides instruction on how to use the Wic utility, provides information on using the Wic plugins interface, and provides several examples that show how to use Wic.
3.16.1 Background
This section provides some background on the Wic utility. While none of this information is required to use Wic, you might find it interesting.
The name “Wic” is derived from OpenEmbedded Image Creator (oeic). The “oe” diphthong in “oeic” was promoted to the letter “w”, because “oeic” is both difficult to remember and to pronounce.
Wic is loosely based on the Meego Image Creator (
mic) framework. The Wic implementation has been heavily modified to make direct use of OpenEmbedded build artifacts instead of package installation and configuration, which are already incorporated within the OpenEmbedded artifacts.Wic is a completely independent standalone utility that initially provides easier-to-use and more flexible replacements for an existing functionality in OE-Core’s image-live class. The difference between Wic and those examples is that with Wic the functionality of those scripts is implemented by a general-purpose partitioning language, which is based on Redhat kickstart syntax.
3.16.2 Requirements
In order to use the Wic utility with the OpenEmbedded Build system, your system needs to meet the following requirements:
The Linux distribution on your development host must support the Yocto Project. See the “Supported Linux Distributions” section in the Yocto Project Reference Manual for the list of distributions that support the Yocto Project.
The standard system utilities, such as
cp, must be installed on your development host system.You must have sourced the build environment setup script (i.e. oe-init-build-env) found in the Build Directory.
You need to have the build artifacts already available, which typically means that you must have already created an image using the Openembedded build system (e.g.
core-image-minimal). While it might seem redundant to generate an image in order to create an image using Wic, the current version of Wic requires the artifacts in the form generated by the OpenEmbedded build system.You must build several native tools, which are built to run on the build system:
$ bitbake parted-native dosfstools-native mtools-native
Include “wic” as part of the IMAGE_FSTYPES variable.
Include the name of the wic kickstart file as part of the WKS_FILE variable
3.16.3 Getting Help
You can get general help for the wic command by entering the wic
command by itself or by entering the command with a help argument as
follows:
$ wic -h
$ wic --help
$ wic help
Currently, Wic supports seven commands: cp, create, help,
list, ls, rm, and write. You can get help for all these
commands except “help” by using the following form:
$ wic help command
For example, the following command returns help for the write
command:
$ wic help write
Wic supports help for three topics: overview, plugins, and
kickstart. You can get help for any topic using the following form:
$ wic help topic
For example, the following returns overview help for Wic:
$ wic help overview
One additional level of help exists for Wic. You can get help on
individual images through the list command. You can use the list
command to return the available Wic images as follows:
$ wic list images
genericx86 Create an EFI disk image for genericx86*
beaglebone-yocto Create SD card image for Beaglebone
edgerouter Create SD card image for Edgerouter
qemux86-directdisk Create a qemu machine 'pcbios' direct disk image
directdisk-gpt Create a 'pcbios' direct disk image
mkefidisk Create an EFI disk image
directdisk Create a 'pcbios' direct disk image
systemd-bootdisk Create an EFI disk image with systemd-boot
mkhybridiso Create a hybrid ISO image
sdimage-bootpart Create SD card image with a boot partition
directdisk-multi-rootfs Create multi rootfs image using rootfs plugin
directdisk-bootloader-config Create a 'pcbios' direct disk image with custom bootloader config
Once you know the list of available
Wic images, you can use help with the command to get help on a
particular image. For example, the following command returns help on the
“beaglebone-yocto” image:
$ wic list beaglebone-yocto help
Creates a partitioned SD card image for Beaglebone.
Boot files are located in the first vfat partition.
3.16.4 Operational Modes
You can use Wic in two different modes, depending on how much control you need for specifying the Openembedded build artifacts that are used for creating the image: Raw and Cooked:
Raw Mode: You explicitly specify build artifacts through Wic command-line arguments.
Cooked Mode: The current MACHINE setting and image name are used to automatically locate and provide the build artifacts. You just supply a kickstart file and the name of the image from which to use artifacts.
Regardless of the mode you use, you need to have the build artifacts ready and available.
3.16.4.1 Raw Mode
Running Wic in raw mode allows you to specify all the partitions through
the wic command line. The primary use for raw mode is if you have
built your kernel outside of the Yocto Project
Build Directory. In other words, you
can point to arbitrary kernel, root filesystem locations, and so forth.
Contrast this behavior with cooked mode where Wic looks in the Build
Directory (e.g. tmp/deploy/images/machine).
The general form of the wic command in raw mode is:
$ wic create wks_file options ...
Where:
wks_file:
An OpenEmbedded kickstart file. You can provide
your own custom file or use a file from a set of
existing files as described by further options.
optional arguments:
-h, --help show this help message and exit
-o OUTDIR, --outdir OUTDIR
name of directory to create image in
-e IMAGE_NAME, --image-name IMAGE_NAME
name of the image to use the artifacts from e.g. core-
image-sato
-r ROOTFS_DIR, --rootfs-dir ROOTFS_DIR
path to the /rootfs dir to use as the .wks rootfs
source
-b BOOTIMG_DIR, --bootimg-dir BOOTIMG_DIR
path to the dir containing the boot artifacts (e.g.
/EFI or /syslinux dirs) to use as the .wks bootimg
source
-k KERNEL_DIR, --kernel-dir KERNEL_DIR
path to the dir containing the kernel to use in the
.wks bootimg
-n NATIVE_SYSROOT, --native-sysroot NATIVE_SYSROOT
path to the native sysroot containing the tools to use
to build the image
-s, --skip-build-check
skip the build check
-f, --build-rootfs build rootfs
-c {gzip,bzip2,xz}, --compress-with {gzip,bzip2,xz}
compress image with specified compressor
-m, --bmap generate .bmap
--no-fstab-update Do not change fstab file.
-v VARS_DIR, --vars VARS_DIR
directory with <image>.env files that store bitbake
variables
-D, --debug output debug information
Note
You do not need root privileges to run Wic. In fact, you should not run as root when using the utility.
3.16.4.2 Cooked Mode
Running Wic in cooked mode leverages off artifacts in the Build
Directory. In other words, you do not have to specify kernel or root
filesystem locations as part of the command. All you need to provide is
a kickstart file and the name of the image from which to use artifacts
by using the “-e” option. Wic looks in the Build Directory (e.g.
tmp/deploy/images/machine) for artifacts.
The general form of the wic command using Cooked Mode is as follows:
$ wic create wks_file -e IMAGE_NAME
Where:
wks_file:
An OpenEmbedded kickstart file. You can provide
your own custom file or use a file from a set of
existing files provided with the Yocto Project
release.
required argument:
-e IMAGE_NAME, --image-name IMAGE_NAME
name of the image to use the artifacts from e.g. core-
image-sato
3.16.5 Using an Existing Kickstart File
If you do not want to create your own kickstart file, you can use an existing file provided by the Wic installation. As shipped, kickstart files can be found in the Yocto Project Source Repositories in the following two locations:
poky/meta-yocto-bsp/wic
poky/scripts/lib/wic/canned-wks
Use the following command to list the available kickstart files:
$ wic list images
genericx86 Create an EFI disk image for genericx86*
beaglebone-yocto Create SD card image for Beaglebone
edgerouter Create SD card image for Edgerouter
qemux86-directdisk Create a qemu machine 'pcbios' direct disk image
directdisk-gpt Create a 'pcbios' direct disk image
mkefidisk Create an EFI disk image
directdisk Create a 'pcbios' direct disk image
systemd-bootdisk Create an EFI disk image with systemd-boot
mkhybridiso Create a hybrid ISO image
sdimage-bootpart Create SD card image with a boot partition
directdisk-multi-rootfs Create multi rootfs image using rootfs plugin
directdisk-bootloader-config Create a 'pcbios' direct disk image with custom bootloader config
When you use an existing file, you
do not have to use the .wks extension. Here is an example in Raw
Mode that uses the directdisk file:
$ wic create directdisk -r rootfs_dir -b bootimg_dir \
-k kernel_dir -n native_sysroot
Here are the actual partition language commands used in the
genericx86.wks file to generate an image:
# short-description: Create an EFI disk image for genericx86*
# long-description: Creates a partitioned EFI disk image for genericx86* machines
part /boot --source bootimg-efi --sourceparams="loader=grub-efi" --ondisk sda --label msdos --active --align 1024
part / --source rootfs --ondisk sda --fstype=ext4 --label platform --align 1024 --use-uuid
part swap --ondisk sda --size 44 --label swap1 --fstype=swap
bootloader --ptable gpt --timeout=5 --append="rootfstype=ext4 console=ttyS0,115200 console=tty0"
3.16.6 Using the Wic Plugin Interface
You can extend and specialize Wic functionality by using Wic plugins. This section explains the Wic plugin interface.
Note
Wic plugins consist of “source” and “imager” plugins. Imager plugins are beyond the scope of this section.
Source plugins provide a mechanism to customize partition content during
the Wic image generation process. You can use source plugins to map
values that you specify using --source commands in kickstart files
(i.e. *.wks) to a plugin implementation used to populate a given
partition.
Note
If you use plugins that have build-time dependencies (e.g. native tools, bootloaders, and so forth) when building a Wic image, you need to specify those dependencies using the WKS_FILE_DEPENDS variable.
Source plugins are subclasses defined in plugin files. As shipped, the Yocto Project provides several plugin files. You can see the source plugin files that ship with the Yocto Project here. Each of these plugin files contains source plugins that are designed to populate a specific Wic image partition.
Source plugins are subclasses of the SourcePlugin class, which is
defined in the poky/scripts/lib/wic/pluginbase.py file. For example,
the BootimgEFIPlugin source plugin found in the bootimg-efi.py
file is a subclass of the SourcePlugin class, which is found in the
pluginbase.py file.
You can also implement source plugins in a layer outside of the Source
Repositories (external layer). To do so, be sure that your plugin files
are located in a directory whose path is
scripts/lib/wic/plugins/source/ within your external layer. When the
plugin files are located there, the source plugins they contain are made
available to Wic.
When the Wic implementation needs to invoke a partition-specific
implementation, it looks for the plugin with the same name as the
--source parameter used in the kickstart file given to that
partition. For example, if the partition is set up using the following
command in a kickstart file:
part /boot --source bootimg-pcbios --ondisk sda --label boot --active --align 1024
The methods defined as class
members of the matching source plugin (i.e. bootimg-pcbios) in the
bootimg-pcbios.py plugin file are used.
To be more concrete, here is the corresponding plugin definition from
the bootimg-pcbios.py file for the previous command along with an
example method called by the Wic implementation when it needs to prepare
a partition using an implementation-specific function:
.
.
.
class BootimgPcbiosPlugin(SourcePlugin):
"""
Create MBR boot partition and install syslinux on it.
"""
name = 'bootimg-pcbios'
.
.
.
@classmethod
def do_prepare_partition(cls, part, source_params, creator, cr_workdir,
oe_builddir, bootimg_dir, kernel_dir,
rootfs_dir, native_sysroot):
"""
Called to do the actual content population for a partition i.e. it
'prepares' the partition to be incorporated into the image.
In this case, prepare content for legacy bios boot partition.
"""
.
.
.
If a
subclass (plugin) itself does not implement a particular function, Wic
locates and uses the default version in the superclass. It is for this
reason that all source plugins are derived from the SourcePlugin
class.
The SourcePlugin class defined in the pluginbase.py file defines
a set of methods that source plugins can implement or override. Any
plugins (subclass of SourcePlugin) that do not implement a
particular method inherit the implementation of the method from the
SourcePlugin class. For more information, see the SourcePlugin
class in the pluginbase.py file for details:
The following list describes the methods implemented in the
SourcePlugin class:
do_prepare_partition(): Called to populate a partition with actual content. In other words, the method prepares the final partition image that is incorporated into the disk image.do_configure_partition(): Called beforedo_prepare_partition()to create custom configuration files for a partition (e.g. syslinux or grub configuration files).do_install_disk(): Called after all partitions have been prepared and assembled into a disk image. This method provides a hook to allow finalization of a disk image (e.g. writing an MBR).do_stage_partition(): Special content-staging hook called beforedo_prepare_partition(). This method is normally empty.Typically, a partition just uses the passed-in parameters (e.g. the unmodified value of
bootimg_dir). However, in some cases, things might need to be more tailored. As an example, certain files might additionally need to be taken frombootimg_dir + /boot. This hook allows those files to be staged in a customized fashion.Note
get_bitbake_var()allows you to access non-standard variables that you might want to use for this behavior.
You can extend the source plugin mechanism. To add more hooks, create
more source plugin methods within SourcePlugin and the corresponding
derived subclasses. The code that calls the plugin methods uses the
plugin.get_source_plugin_methods() function to find the method or
methods needed by the call. Retrieval of those methods is accomplished
by filling up a dict with keys that contain the method names of
interest. On success, these will be filled in with the actual methods.
See the Wic implementation for examples and details.
3.16.7 Wic Examples
This section provides several examples that show how to use the Wic
utility. All the examples assume the list of requirements in the
“Requirements” section have been met. The
examples assume the previously generated image is
core-image-minimal.
3.16.7.1 Generate an Image using an Existing Kickstart File
This example runs in Cooked Mode and uses the mkefidisk kickstart
file:
$ wic create mkefidisk -e core-image-minimal
INFO: Building wic-tools...
.
.
.
INFO: The new image(s) can be found here:
./mkefidisk-201804191017-sda.direct
The following build artifacts were used to create the image(s):
ROOTFS_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/rootfs
BOOTIMG_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/recipe-sysroot/usr/share
KERNEL_DIR: /home/stephano/build/master/build/tmp-glibc/deploy/images/qemux86
NATIVE_SYSROOT: /home/stephano/build/master/build/tmp-glibc/work/i586-oe-linux/wic-tools/1.0-r0/recipe-sysroot-native
INFO: The image(s) were created using OE kickstart file:
/home/stephano/build/master/openembedded-core/scripts/lib/wic/canned-wks/mkefidisk.wks
The previous example shows the easiest way to create an image by running
in cooked mode and supplying a kickstart file and the “-e” option to
point to the existing build artifacts. Your local.conf file needs to
have the MACHINE variable set
to the machine you are using, which is “qemux86” in this example.
Once the image builds, the output provides image location, artifact use, and kickstart file information.
Note
You should always verify the details provided in the output to make sure that the image was indeed created exactly as expected.
Continuing with the example, you can now write the image from the Build
Directory onto a USB stick, or whatever media for which you built your
image, and boot from the media. You can write the image by using
bmaptool or dd:
$ oe-run-native bmaptool copy mkefidisk-201804191017-sda.direct /dev/sdX
or
$ sudo dd if=mkefidisk-201804191017-sda.direct of=/dev/sdX
Note
For more information on how to use the bmaptool
to flash a device with an image, see the
“Flashing Images Using bmaptool”
section.
3.16.7.2 Using a Modified Kickstart File
Because partitioned image creation is driven by the kickstart file, it
is easy to affect image creation by changing the parameters in the file.
This next example demonstrates that through modification of the
directdisk-gpt kickstart file.
As mentioned earlier, you can use the command wic list images to
show the list of existing kickstart files. The directory in which the
directdisk-gpt.wks file resides is
scripts/lib/image/canned-wks/, which is located in the
Source Directory (e.g. poky).
Because available files reside in this directory, you can create and add
your own custom files to the directory. Subsequent use of the
wic list images command would then include your kickstart files.
In this example, the existing directdisk-gpt file already does most
of what is needed. However, for the hardware in this example, the image
will need to boot from sdb instead of sda, which is what the
directdisk-gpt kickstart file uses.
The example begins by making a copy of the directdisk-gpt.wks file
in the scripts/lib/image/canned-wks directory and then by changing
the lines that specify the target disk from which to boot.
$ cp /home/stephano/poky/scripts/lib/wic/canned-wks/directdisk-gpt.wks \
/home/stephano/poky/scripts/lib/wic/canned-wks/directdisksdb-gpt.wks
Next, the example modifies the directdisksdb-gpt.wks file and
changes all instances of “--ondisk sda” to “--ondisk sdb”. The
example changes the following two lines and leaves the remaining lines
untouched:
part /boot --source bootimg-pcbios --ondisk sdb --label boot --active --align 1024
part / --source rootfs --ondisk sdb --fstype=ext4 --label platform --align 1024 --use-uuid
Once the lines are changed, the
example generates the directdisksdb-gpt image. The command points
the process at the core-image-minimal artifacts for the Next Unit of
Computing (nuc) MACHINE the
local.conf.
$ wic create directdisksdb-gpt -e core-image-minimal
INFO: Building wic-tools...
.
.
.
Initialising tasks: 100% |#######################################| Time: 0:00:01
NOTE: Executing SetScene Tasks
NOTE: Executing RunQueue Tasks
NOTE: Tasks Summary: Attempted 1161 tasks of which 1157 didn't need to be rerun and all succeeded.
INFO: Creating image(s)...
INFO: The new image(s) can be found here:
./directdisksdb-gpt-201710090938-sdb.direct
The following build artifacts were used to create the image(s):
ROOTFS_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/rootfs
BOOTIMG_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/recipe-sysroot/usr/share
KERNEL_DIR: /home/stephano/build/master/build/tmp-glibc/deploy/images/qemux86
NATIVE_SYSROOT: /home/stephano/build/master/build/tmp-glibc/work/i586-oe-linux/wic-tools/1.0-r0/recipe-sysroot-native
INFO: The image(s) were created using OE kickstart file:
/home/stephano/poky/scripts/lib/wic/canned-wks/directdisksdb-gpt.wks
Continuing with the example, you can now directly dd the image to a
USB stick, or whatever media for which you built your image, and boot
the resulting media:
$ sudo dd if=directdisksdb-gpt-201710090938-sdb.direct of=/dev/sdb
140966+0 records in
140966+0 records out
72174592 bytes (72 MB, 69 MiB) copied, 78.0282 s, 925 kB/s
$ sudo eject /dev/sdb
3.16.7.3 Using a Modified Kickstart File and Running in Raw Mode
This next example manually specifies each build artifact (runs in Raw
Mode) and uses a modified kickstart file. The example also uses the
-o option to cause Wic to create the output somewhere other than the
default output directory, which is the current directory:
$ wic create /home/stephano/my_yocto/test.wks -o /home/stephano/testwic \
--rootfs-dir /home/stephano/build/master/build/tmp/work/qemux86-poky-linux/core-image-minimal/1.0-r0/rootfs \
--bootimg-dir /home/stephano/build/master/build/tmp/work/qemux86-poky-linux/core-image-minimal/1.0-r0/recipe-sysroot/usr/share \
--kernel-dir /home/stephano/build/master/build/tmp/deploy/images/qemux86 \
--native-sysroot /home/stephano/build/master/build/tmp/work/i586-poky-linux/wic-tools/1.0-r0/recipe-sysroot-native
INFO: Creating image(s)...
INFO: The new image(s) can be found here:
/home/stephano/testwic/test-201710091445-sdb.direct
The following build artifacts were used to create the image(s):
ROOTFS_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/rootfs
BOOTIMG_DIR: /home/stephano/build/master/build/tmp-glibc/work/qemux86-oe-linux/core-image-minimal/1.0-r0/recipe-sysroot/usr/share
KERNEL_DIR: /home/stephano/build/master/build/tmp-glibc/deploy/images/qemux86
NATIVE_SYSROOT: /home/stephano/build/master/build/tmp-glibc/work/i586-oe-linux/wic-tools/1.0-r0/recipe-sysroot-native
INFO: The image(s) were created using OE kickstart file:
/home/stephano/my_yocto/test.wks
For this example,
MACHINE did not have to be
specified in the local.conf file since the artifact is manually
specified.
3.16.7.4 Using Wic to Manipulate an Image
Wic image manipulation allows you to shorten turnaround time during image development. For example, you can use Wic to delete the kernel partition of a Wic image and then insert a newly built kernel. This saves you time from having to rebuild the entire image each time you modify the kernel.
Note
In order to use Wic to manipulate a Wic image as in this example,
your development machine must have the mtools package installed.
The following example examines the contents of the Wic image, deletes the existing kernel, and then inserts a new kernel:
List the Partitions: Use the
wic lscommand to list all the partitions in the Wic image:$ wic ls tmp/deploy/images/qemux86/core-image-minimal-qemux86.wic Num Start End Size Fstype 1 1048576 25041919 23993344 fat16 2 25165824 72157183 46991360 ext4
The previous output shows two partitions in the
core-image-minimal-qemux86.wicimage.Examine a Particular Partition: Use the
wic lscommand again but in a different form to examine a particular partition.Note
You can get command usage on any Wic command using the following form:
$ wic help command
For example, the following command shows you the various ways to use the wic ls command:
$ wic help ls
The following command shows what is in Partition one:
$ wic ls tmp/deploy/images/qemux86/core-image-minimal-qemux86.wic:1 Volume in drive : is boot Volume Serial Number is E894-1809 Directory for ::/ libcom32 c32 186500 2017-10-09 16:06 libutil c32 24148 2017-10-09 16:06 syslinux cfg 220 2017-10-09 16:06 vesamenu c32 27104 2017-10-09 16:06 vmlinuz 6904608 2017-10-09 16:06 5 files 7 142 580 bytes 16 582 656 bytes freeThe previous output shows five files, with the
vmlinuzbeing the kernel.Note
If you see the following error, you need to update or create a
~/.mtoolsrcfile and be sure to have the line “mtools_skip_check=1” in the file. Then, run the Wic command again:ERROR: _exec_cmd: /usr/bin/mdir -i /tmp/wic-parttfokuwra ::/ returned '1' instead of 0 output: Total number of sectors (47824) not a multiple of sectors per track (32)! Add mtools_skip_check=1 to your .mtoolsrc file to skip this test
Remove the Old Kernel: Use the
wic rmcommand to remove thevmlinuzfile (kernel):$ wic rm tmp/deploy/images/qemux86/core-image-minimal-qemux86.wic:1/vmlinuz
Add In the New Kernel: Use the
wic cpcommand to add the updated kernel to the Wic image. Depending on how you built your kernel, it could be in different places. If you useddevtooland an SDK to build your kernel, it resides in thetmp/workdirectory of the extensible SDK. If you usedmaketo build the kernel, the kernel will be in theworkspace/sourcesarea.The following example assumes
devtoolwas used to build the kernel:cp ~/poky_sdk/tmp/work/qemux86-poky-linux/linux-yocto/4.12.12+git999-r0/linux-yocto-4.12.12+git999/arch/x86/boot/bzImage \ ~/poky/build/tmp/deploy/images/qemux86/core-image-minimal-qemux86.wic:1/vmlinuz
Once the new kernel is added back into the image, you can use the
ddcommand or bmaptool to flash your wic image onto an SD card or USB stick and test your target.Note
Using
bmaptoolis generally 10 to 20 times faster than usingdd.
3.17 Flashing Images Using bmaptool
A fast and easy way to flash an image to a bootable device is to use Bmaptool, which is integrated into the OpenEmbedded build system. Bmaptool is a generic tool that creates a file’s block map (bmap) and then uses that map to copy the file. As compared to traditional tools such as dd or cp, Bmaptool can copy (or flash) large files like raw system image files much faster.
Note
If you are using Ubuntu or Debian distributions, you can install the
bmap-toolspackage using the following command and then use the tool without specifyingPATHeven from the root account:$ sudo apt-get install bmap-tools
If you are unable to install the
bmap-toolspackage, you will need to build Bmaptool before using it. Use the following command:$ bitbake bmap-tools-native
Following, is an example that shows how to flash a Wic image. Realize that while this example uses a Wic image, you can use Bmaptool to flash any type of image. Use these steps to flash an image using Bmaptool:
Update your local.conf File: You need to have the following set in your
local.conffile before building your image:IMAGE_FSTYPES += "wic wic.bmap"
Get Your Image: Either have your image ready (pre-built with the IMAGE_FSTYPES setting previously mentioned) or take the step to build the image:
$ bitbake image
Flash the Device: Flash the device with the image by using Bmaptool depending on your particular setup. The following commands assume the image resides in the Build Directory’s
deploy/images/area:If you have write access to the media, use this command form:
$ oe-run-native bmap-tools-native bmaptool copy build-directory/tmp/deploy/images/machine/image.wic /dev/sdX
If you do not have write access to the media, set your permissions first and then use the same command form:
$ sudo chmod 666 /dev/sdX $ oe-run-native bmap-tools-native bmaptool copy build-directory/tmp/deploy/images/machine/image.wic /dev/sdX
For help on the bmaptool command, use the following command:
$ bmaptool --help
3.18 Making Images More Secure
Security is of increasing concern for embedded devices. Consider the issues and problems discussed in just this sampling of work found across the Internet:
“Security Risks of Embedded Systems“ by Bruce Schneier
“Internet Census 2012“ by Carna Botnet
“Security Issues for Embedded Devices“ by Jake Edge
When securing your image is of concern, there are steps, tools, and variables that you can consider to help you reach the security goals you need for your particular device. Not all situations are identical when it comes to making an image secure. Consequently, this section provides some guidance and suggestions for consideration when you want to make your image more secure.
Note
Because the security requirements and risks are different for every type of device, this section cannot provide a complete reference on securing your custom OS. It is strongly recommended that you also consult other sources of information on embedded Linux system hardening and on security.
3.18.1 General Considerations
General considerations exist that help you create more secure images. You should consider the following suggestions to help make your device more secure:
Scan additional code you are adding to the system (e.g. application code) by using static analysis tools. Look for buffer overflows and other potential security problems.
Pay particular attention to the security for any web-based administration interface.
Web interfaces typically need to perform administrative functions and tend to need to run with elevated privileges. Thus, the consequences resulting from the interface’s security becoming compromised can be serious. Look for common web vulnerabilities such as cross-site-scripting (XSS), unvalidated inputs, and so forth.
As with system passwords, the default credentials for accessing a web-based interface should not be the same across all devices. This is particularly true if the interface is enabled by default as it can be assumed that many end-users will not change the credentials.
Ensure you can update the software on the device to mitigate vulnerabilities discovered in the future. This consideration especially applies when your device is network-enabled.
Ensure you remove or disable debugging functionality before producing the final image. For information on how to do this, see the “Considerations Specific to the OpenEmbedded Build System” section.
Ensure you have no network services listening that are not needed.
Remove any software from the image that is not needed.
Enable hardware support for secure boot functionality when your device supports this functionality.
3.18.2 Security Flags
The Yocto Project has security flags that you can enable that help make
your build output more secure. The security flags are in the
meta/conf/distro/include/security_flags.inc file in your
Source Directory (e.g. poky).
Note
Depending on the recipe, certain security flags are enabled and disabled by default.
Use the following line in your local.conf file or in your custom
distribution configuration file to enable the security compiler and
linker flags for your build:
require conf/distro/include/security_flags.inc
3.18.3 Considerations Specific to the OpenEmbedded Build System
You can take some steps that are specific to the OpenEmbedded build system to make your images more secure:
Ensure “debug-tweaks” is not one of your selected IMAGE_FEATURES. When creating a new project, the default is to provide you with an initial
local.conffile that enables this feature using the EXTRA_IMAGE_FEATURES variable with the line:EXTRA_IMAGE_FEATURES = "debug-tweaks"
To disable that feature, simply comment out that line in your
local.conffile, or make sureIMAGE_FEATURESdoes not contain “debug-tweaks” before producing your final image. Among other things, leaving this in place sets the root password as blank, which makes logging in for debugging or inspection easy during development but also means anyone can easily log in during production.It is possible to set a root password for the image and also to set passwords for any extra users you might add (e.g. administrative or service type users). When you set up passwords for multiple images or users, you should not duplicate passwords.
To set up passwords, use the extrausers class, which is the preferred method. For an example on how to set up both root and user passwords, see the “extrausers.bbclass” section.
Note
When adding extra user accounts or setting a root password, be cautious about setting the same password on every device. If you do this, and the password you have set is exposed, then every device is now potentially compromised. If you need this access but want to ensure security, consider setting a different, random password for each device. Typically, you do this as a separate step after you deploy the image onto the device.
Consider enabling a Mandatory Access Control (MAC) framework such as SMACK or SELinux and tuning it appropriately for your device’s usage. You can find more information in the meta-selinux layer.
3.18.4 Tools for Hardening Your Image
The Yocto Project provides tools for making your image more secure. You
can find these tools in the meta-security layer of the
Yocto Project Source Repositories.
3.19 Creating Your Own Distribution
When you build an image using the Yocto Project and do not alter any distribution Metadata, you are creating a Poky distribution. If you wish to gain more control over package alternative selections, compile-time options, and other low-level configurations, you can create your own distribution.
To create your own distribution, the basic steps consist of creating your own distribution layer, creating your own distribution configuration file, and then adding any needed code and Metadata to the layer. The following steps provide some more detail:
Create a layer for your new distro: Create your distribution layer so that you can keep your Metadata and code for the distribution separate. It is strongly recommended that you create and use your own layer for configuration and code. Using your own layer as compared to just placing configurations in a
local.confconfiguration file makes it easier to reproduce the same build configuration when using multiple build machines. See the “Creating a General Layer Using the bitbake-layers Script” section for information on how to quickly set up a layer.Create the distribution configuration file: The distribution configuration file needs to be created in the
conf/distrodirectory of your layer. You need to name it using your distribution name (e.g.mydistro.conf).Note
The DISTRO variable in your
local.conffile determines the name of your distribution.You can split out parts of your configuration file into include files and then “require” them from within your distribution configuration file. Be sure to place the include files in the
conf/distro/includedirectory of your layer. A common example usage of include files would be to separate out the selection of desired version and revisions for individual recipes.Your configuration file needs to set the following required variables:
These following variables are optional and you typically set them from the distribution configuration file:
Tip
If you want to base your distribution configuration file on the very basic configuration from OE-Core, you can use
conf/distro/defaultsetup.confas a reference and just include variables that differ as compared todefaultsetup.conf. Alternatively, you can create a distribution configuration file from scratch using thedefaultsetup.conffile or configuration files from other distributions such as Poky or Angstrom as references.Provide miscellaneous variables: Be sure to define any other variables for which you want to create a default or enforce as part of the distribution configuration. You can include nearly any variable from the
local.conffile. The variables you use are not limited to the list in the previous bulleted item.Point to Your distribution configuration file: In your
local.conffile in the Build Directory, set your DISTRO variable to point to your distribution’s configuration file. For example, if your distribution’s configuration file is namedmydistro.conf, then you point to it as follows:DISTRO = "mydistro"
Add more to the layer if necessary: Use your layer to hold other information needed for the distribution:
Add recipes for installing distro-specific configuration files that are not already installed by another recipe. If you have distro-specific configuration files that are included by an existing recipe, you should add an append file (
.bbappend) for those. For general information and recommendations on how to add recipes to your layer, see the “Creating Your Own Layer” and “Following Best Practices When Creating Layers” sections.Add any image recipes that are specific to your distribution.
Add a
psplashappend file for a branded splash screen. For information on append files, see the “Using .bbappend Files in Your Layer” section.Add any other append files to make custom changes that are specific to individual recipes.
3.20 Creating a Custom Template Configuration Directory
If you are producing your own customized version of the build system for
use by other users, you might want to customize the message shown by the
setup script or you might want to change the template configuration
files (i.e. local.conf and bblayers.conf) that are created in a
new build directory.
The OpenEmbedded build system uses the environment variable
TEMPLATECONF to locate the directory from which it gathers
configuration information that ultimately ends up in the
Build Directory conf directory.
By default, TEMPLATECONF is set as follows in the poky
repository:
TEMPLATECONF=${TEMPLATECONF:-meta-poky/conf}
This is the
directory used by the build system to find templates from which to build
some key configuration files. If you look at this directory, you will
see the bblayers.conf.sample, local.conf.sample, and
conf-notes.txt files. The build system uses these files to form the
respective bblayers.conf file, local.conf file, and display the
list of BitBake targets when running the setup script.
To override these default configuration files with configurations you
want used within every new Build Directory, simply set the
TEMPLATECONF variable to your directory. The TEMPLATECONF
variable is set in the .templateconf file, which is in the top-level
Source Directory folder
(e.g. poky). Edit the .templateconf so that it can locate your
directory.
Best practices dictate that you should keep your template configuration
directory in your custom distribution layer. For example, suppose you
have a layer named meta-mylayer located in your home directory and
you want your template configuration directory named myconf.
Changing the .templateconf as follows causes the OpenEmbedded build
system to look in your directory and base its configuration files on the
*.sample configuration files it finds. The final configuration files
(i.e. local.conf and bblayers.conf ultimately still end up in
your Build Directory, but they are based on your *.sample files.
TEMPLATECONF=${TEMPLATECONF:-meta-mylayer/myconf}
Aside from the *.sample configuration files, the conf-notes.txt
also resides in the default meta-poky/conf directory. The script
that sets up the build environment (i.e.
oe-init-build-env) uses this file to
display BitBake targets as part of the script output. Customizing this
conf-notes.txt file is a good way to make sure your list of custom
targets appears as part of the script’s output.
Here is the default list of targets displayed as a result of running either of the setup scripts:
You can now run 'bitbake <target>'
Common targets are:
core-image-minimal
core-image-sato
meta-toolchain
meta-ide-support
Changing the listed common targets is as easy as editing your version of
conf-notes.txt in your custom template configuration directory and
making sure you have TEMPLATECONF set to your directory.
3.21 Conserving Disk Space During Builds
To help conserve disk space during builds, you can add the following
statement to your project’s local.conf configuration file found in
the Build Directory:
INHERIT += "rm_work"
Adding this statement deletes the work directory used for building a recipe once the recipe is built. For more information on “rm_work”, see the rm_work class in the Yocto Project Reference Manual.
3.22 Working with Packages
This section describes a few tasks that involve packages:
3.22.1 Excluding Packages from an Image
You might find it necessary to prevent specific packages from being installed into an image. If so, you can use several variables to direct the build system to essentially ignore installing recommended packages or to not install a package at all.
The following list introduces variables you can use to prevent packages
from being installed into your image. Each of these variables only works
with IPK and RPM package types. Support for Debian packages does not
exist. Also, you can use these variables from your local.conf file
or attach them to a specific image recipe by using a recipe name
override. For more detail on the variables, see the descriptions in the
Yocto Project Reference Manual’s glossary chapter.
BAD_RECOMMENDATIONS: Use this variable to specify “recommended-only” packages that you do not want installed.
NO_RECOMMENDATIONS: Use this variable to prevent all “recommended-only” packages from being installed.
PACKAGE_EXCLUDE: Use this variable to prevent specific packages from being installed regardless of whether they are “recommended-only” or not. You need to realize that the build process could fail with an error when you prevent the installation of a package whose presence is required by an installed package.
3.22.2 Incrementing a Package Version
This section provides some background on how binary package versioning is accomplished and presents some of the services, variables, and terminology involved.
In order to understand binary package versioning, you need to consider the following:
Binary Package: The binary package that is eventually built and installed into an image.
Binary Package Version: The binary package version is composed of two components - a version and a revision.
Note
Technically, a third component, the “epoch” (i.e. PE) is involved but this discussion for the most part ignores
PE.The version and revision are taken from the PV and PR variables, respectively.
PV: The recipe version.PVrepresents the version of the software being packaged. Do not confusePVwith the binary package version.PR: The recipe revision.SRCPV: The OpenEmbedded build system uses this string to help define the value of
PVwhen the source code revision needs to be included in it.PR Service: A network-based service that helps automate keeping package feeds compatible with existing package manager applications such as RPM, APT, and OPKG.
Whenever the binary package content changes, the binary package version
must change. Changing the binary package version is accomplished by
changing or “bumping” the PR and/or PV values. Increasing these
values occurs one of two ways:
Automatically using a Package Revision Service (PR Service).
Manually incrementing the
PRand/orPVvariables.
Given a primary challenge of any build system and its users is how to maintain a package feed that is compatible with existing package manager applications such as RPM, APT, and OPKG, using an automated system is much preferred over a manual system. In either system, the main requirement is that binary package version numbering increases in a linear fashion and that a number of version components exist that support that linear progression. For information on how to ensure package revisioning remains linear, see the “Automatically Incrementing a Binary Package Revision Number” section.
The following three sections provide related information on the PR
Service, the manual method for “bumping” PR and/or PV, and on
how to ensure binary package revisioning remains linear.
3.22.2.1 Working With a PR Service
As mentioned, attempting to maintain revision numbers in the Metadata is error prone, inaccurate, and causes problems for people submitting recipes. Conversely, the PR Service automatically generates increasing numbers, particularly the revision field, which removes the human element.
Note
For additional information on using a PR Service, you can see the PR Service wiki page.
The Yocto Project uses variables in order of decreasing priority to facilitate revision numbering (i.e. PE, PV, and PR for epoch, version, and revision, respectively). The values are highly dependent on the policies and procedures of a given distribution and package feed.
Because the OpenEmbedded build system uses
“signatures”, which are
unique to a given build, the build system knows when to rebuild
packages. All the inputs into a given task are represented by a
signature, which can trigger a rebuild when different. Thus, the build
system itself does not rely on the PR, PV, and PE numbers to
trigger a rebuild. The signatures, however, can be used to generate
these values.
The PR Service works with both OEBasic and OEBasicHash
generators. The value of PR bumps when the checksum changes and the
different generator mechanisms change signatures under different
circumstances.
As implemented, the build system includes values from the PR Service
into the PR field as an addition using the form “.x” so r0
becomes r0.1, r0.2 and so forth. This scheme allows existing
PR values to be used for whatever reasons, which include manual
PR bumps, should it be necessary.
By default, the PR Service is not enabled or running. Thus, the packages generated are just “self consistent”. The build system adds and removes packages and there are no guarantees about upgrade paths but images will be consistent and correct with the latest changes.
The simplest form for a PR Service is for it to exist for a single host
development system that builds the package feed (building system). For
this scenario, you can enable a local PR Service by setting
PRSERV_HOST in your
local.conf file in the Build Directory:
PRSERV_HOST = "localhost:0"
Once the service is started, packages will automatically
get increasing PR values and BitBake takes care of starting and
stopping the server.
If you have a more complex setup where multiple host development systems
work against a common, shared package feed, you have a single PR Service
running and it is connected to each building system. For this scenario,
you need to start the PR Service using the bitbake-prserv command:
bitbake-prserv --host ip --port port --start
In addition to
hand-starting the service, you need to update the local.conf file of
each building system as described earlier so each system points to the
server and port.
It is also recommended you use build history, which adds some sanity
checks to binary package versions, in conjunction with the server that
is running the PR Service. To enable build history, add the following to
each building system’s local.conf file:
# It is recommended to activate "buildhistory" for testing the PR service
INHERIT += "buildhistory"
BUILDHISTORY_COMMIT = "1"
For information on build history, see the “Maintaining Build Output Quality” section.
Note
The OpenEmbedded build system does not maintain PR information as
part of the shared state (sstate) packages. If you maintain an sstate
feed, its expected that either all your building systems that
contribute to the sstate feed use a shared PR Service, or you do not
run a PR Service on any of your building systems. Having some systems
use a PR Service while others do not leads to obvious problems.
For more information on shared state, see the “Shared State Cache” section in the Yocto Project Overview and Concepts Manual.
3.22.2.2 Manually Bumping PR
The alternative to setting up a PR Service is to manually “bump” the PR variable.
If a committed change results in changing the package output, then the
value of the PR variable needs to be increased (or “bumped”) as part of
that commit. For new recipes you should add the PR variable and set
its initial value equal to “r0”, which is the default. Even though the
default value is “r0”, the practice of adding it to a new recipe makes
it harder to forget to bump the variable when you make changes to the
recipe in future.
If you are sharing a common .inc file with multiple recipes, you can
also use the INC_PR variable to ensure that the recipes sharing the
.inc file are rebuilt when the .inc file itself is changed. The
.inc file must set INC_PR (initially to “r0”), and all recipes
referring to it should set PR to “${INC_PR}.0” initially,
incrementing the last number when the recipe is changed. If the .inc
file is changed then its INC_PR should be incremented.
When upgrading the version of a binary package, assuming the PV
changes, the PR variable should be reset to “r0” (or “${INC_PR}.0”
if you are using INC_PR).
Usually, version increases occur only to binary packages. However, if
for some reason PV changes but does not increase, you can increase
the PE variable (Package Epoch). The PE variable defaults to
“0”.
Binary package version numbering strives to follow the Debian Version Field Policy Guidelines. These guidelines define how versions are compared and what “increasing” a version means.
3.22.2.3 Automatically Incrementing a Package Version Number
When fetching a repository, BitBake uses the
SRCREV variable to determine
the specific source code revision from which to build. You set the
SRCREV variable to
AUTOREV to cause the
OpenEmbedded build system to automatically use the latest revision of
the software:
SRCREV = "${AUTOREV}"
Furthermore, you need to reference SRCPV in PV in order to
automatically update the version whenever the revision of the source
code changes. Here is an example:
PV = "1.0+git${SRCPV}"
The OpenEmbedded build system substitutes SRCPV with the following:
AUTOINC+source_code_revision
The build system replaces the AUTOINC
with a number. The number used depends on the state of the PR Service:
If PR Service is enabled, the build system increments the number, which is similar to the behavior of PR. This behavior results in linearly increasing package versions, which is desirable. Here is an example:
hello-world-git_0.0+git0+b6558dd387-r0.0_armv7a-neon.ipk hello-world-git_0.0+git1+dd2f5c3565-r0.0_armv7a-neon.ipk
If PR Service is not enabled, the build system replaces the
AUTOINCplaceholder with zero (i.e. “0”). This results in changing the package version since the source revision is included. However, package versions are not increased linearly. Here is an example:hello-world-git_0.0+git0+b6558dd387-r0.0_armv7a-neon.ipk hello-world-git_0.0+git0+dd2f5c3565-r0.0_armv7a-neon.ipk
In summary, the OpenEmbedded build system does not track the history of
binary package versions for this purpose. AUTOINC, in this case, is
comparable to PR. If PR server is not enabled, AUTOINC in the
package version is simply replaced by “0”. If PR server is enabled, the
build system keeps track of the package versions and bumps the number
when the package revision changes.
3.22.3 Handling Optional Module Packaging
Many pieces of software split functionality into optional modules (or plugins) and the plugins that are built might depend on configuration options. To avoid having to duplicate the logic that determines what modules are available in your recipe or to avoid having to package each module by hand, the OpenEmbedded build system provides functionality to handle module packaging dynamically.
To handle optional module packaging, you need to do two things:
Ensure the module packaging is actually done.
Ensure that any dependencies on optional modules from other recipes are satisfied by your recipe.
3.22.3.1 Making Sure the Packaging is Done
To ensure the module packaging actually gets done, you use the
do_split_packages function within the populate_packages Python
function in your recipe. The do_split_packages function searches for
a pattern of files or directories under a specified path and creates a
package for each one it finds by appending to the
PACKAGES variable and
setting the appropriate values for FILES_packagename,
RDEPENDS_packagename, DESCRIPTION_packagename, and so forth.
Here is an example from the lighttpd recipe:
python populate_packages_prepend () {
lighttpd_libdir = d.expand('${libdir}')
do_split_packages(d, lighttpd_libdir, '^mod_(.*).so$',
'lighttpd-module-%s', 'Lighttpd module for %s',
extra_depends='')
}
The previous example specifies a number of things in the call to
do_split_packages.
A directory within the files installed by your recipe through
do_installin which to search.A regular expression used to match module files in that directory. In the example, note the parentheses () that mark the part of the expression from which the module name should be derived.
A pattern to use for the package names.
A description for each package.
An empty string for
extra_depends, which disables the default dependency on the mainlighttpdpackage. Thus, if a file in${libdir}calledmod_alias.sois found, a package calledlighttpd-module-aliasis created for it and the DESCRIPTION is set to “Lighttpd module for alias”.
Often, packaging modules is as simple as the previous example. However,
more advanced options exist that you can use within
do_split_packages to modify its behavior. And, if you need to, you
can add more logic by specifying a hook function that is called for each
package. It is also perfectly acceptable to call do_split_packages
multiple times if you have more than one set of modules to package.
For more examples that show how to use do_split_packages, see the
connman.inc file in the meta/recipes-connectivity/connman/
directory of the poky source repository. You can
also find examples in meta/classes/kernel.bbclass.
Following is a reference that shows do_split_packages mandatory and
optional arguments:
Mandatory arguments
root
The path in which to search
file_regex
Regular expression to match searched files.
Use parentheses () to mark the part of this
expression that should be used to derive the
module name (to be substituted where %s is
used in other function arguments as noted below)
output_pattern
Pattern to use for the package names. Must
include %s.
description
Description to set for each package. Must
include %s.
Optional arguments
postinst
Postinstall script to use for all packages
(as a string)
recursive
True to perform a recursive search - default
False
hook
A hook function to be called for every match.
The function will be called with the following
arguments (in the order listed):
f
Full path to the file/directory match
pkg
The package name
file_regex
As above
output_pattern
As above
modulename
The module name derived using file_regex
extra_depends
Extra runtime dependencies (RDEPENDS) to be
set for all packages. The default value of None
causes a dependency on the main package
(${PN}) - if you do not want this, pass empty
string '' for this parameter.
aux_files_pattern
Extra item(s) to be added to FILES for each
package. Can be a single string item or a list
of strings for multiple items. Must include %s.
postrm
postrm script to use for all packages (as a
string)
allow_dirs
True to allow directories to be matched -
default False
prepend
If True, prepend created packages to PACKAGES
instead of the default False which appends them
match_path
match file_regex on the whole relative path to
the root rather than just the file name
aux_files_pattern_verbatim
Extra item(s) to be added to FILES for each
package, using the actual derived module name
rather than converting it to something legal
for a package name. Can be a single string item
or a list of strings for multiple items. Must
include %s.
allow_links
True to allow symlinks to be matched - default
False
summary
Summary to set for each package. Must include %s;
defaults to description if not set.
3.22.3.2 Satisfying Dependencies
The second part for handling optional module packaging is to ensure that
any dependencies on optional modules from other recipes are satisfied by
your recipe. You can be sure these dependencies are satisfied by using
the PACKAGES_DYNAMIC
variable. Here is an example that continues with the lighttpd recipe
shown earlier:
PACKAGES_DYNAMIC = "lighttpd-module-.*"
The name
specified in the regular expression can of course be anything. In this
example, it is lighttpd-module- and is specified as the prefix to
ensure that any RDEPENDS and
RRECOMMENDS on a package
name starting with the prefix are satisfied during build time. If you
are using do_split_packages as described in the previous section,
the value you put in PACKAGES_DYNAMIC should correspond to the name
pattern specified in the call to do_split_packages.
3.22.4 Using Runtime Package Management
During a build, BitBake always transforms a recipe into one or more
packages. For example, BitBake takes the bash recipe and produces a
number of packages (e.g. bash, bash-bashbug,
bash-completion, bash-completion-dbg, bash-completion-dev,
bash-completion-extra, bash-dbg, and so forth). Not all
generated packages are included in an image.
In several situations, you might need to update, add, remove, or query the packages on a target device at runtime (i.e. without having to generate a new image). Examples of such situations include:
You want to provide in-the-field updates to deployed devices (e.g. security updates).
You want to have a fast turn-around development cycle for one or more applications that run on your device.
You want to temporarily install the “debug” packages of various applications on your device so that debugging can be greatly improved by allowing access to symbols and source debugging.
You want to deploy a more minimal package selection of your device but allow in-the-field updates to add a larger selection for customization.
In all these situations, you have something similar to a more traditional Linux distribution in that in-field devices are able to receive pre-compiled packages from a server for installation or update. Being able to install these packages on a running, in-field device is what is termed “runtime package management”.
In order to use runtime package management, you need a host or server machine that serves up the pre-compiled packages plus the required metadata. You also need package manipulation tools on the target. The build machine is a likely candidate to act as the server. However, that machine does not necessarily have to be the package server. The build machine could push its artifacts to another machine that acts as the server (e.g. Internet-facing). In fact, doing so is advantageous for a production environment as getting the packages away from the development system’s build directory prevents accidental overwrites.
A simple build that targets just one device produces more than one
package database. In other words, the packages produced by a build are
separated out into a couple of different package groupings based on
criteria such as the target’s CPU architecture, the target board, or the
C library used on the target. For example, a build targeting the
qemux86 device produces the following three package databases:
noarch, i586, and qemux86. If you wanted your qemux86
device to be aware of all the packages that were available to it, you
would need to point it to each of these databases individually. In a
similar way, a traditional Linux distribution usually is configured to
be aware of a number of software repositories from which it retrieves
packages.
Using runtime package management is completely optional and not required for a successful build or deployment in any way. But if you want to make use of runtime package management, you need to do a couple things above and beyond the basics. The remainder of this section describes what you need to do.
3.22.4.1 Build Considerations
This section describes build considerations of which you need to be aware in order to provide support for runtime package management.
When BitBake generates packages, it needs to know what format or formats to use. In your configuration, you use the PACKAGE_CLASSES variable to specify the format:
Open the
local.conffile inside your Build Directory (e.g.~/poky/build/conf/local.conf).Select the desired package format as follows:
PACKAGE_CLASSES ?= "package_packageformat"
where packageformat can be “ipk”, “rpm”, “deb”, or “tar” which are the supported package formats.
Note
Because the Yocto Project supports four different package formats, you can set the variable with more than one argument. However, the OpenEmbedded build system only uses the first argument when creating an image or Software Development Kit (SDK).
If you would like your image to start off with a basic package database containing the packages in your current build as well as to have the relevant tools available on the target for runtime package management, you can include “package-management” in the IMAGE_FEATURES variable. Including “package-management” in this configuration variable ensures that when the image is assembled for your target, the image includes the currently-known package databases as well as the target-specific tools required for runtime package management to be performed on the target. However, this is not strictly necessary. You could start your image off without any databases but only include the required on-target package tool(s). As an example, you could include “opkg” in your IMAGE_INSTALL variable if you are using the IPK package format. You can then initialize your target’s package database(s) later once your image is up and running.
Whenever you perform any sort of build step that can potentially generate a package or modify existing package, it is always a good idea to re-generate the package index after the build by using the following command:
$ bitbake package-index
It might be tempting to build the package and the package index at the same time with a command such as the following:
$ bitbake some-package package-index
Do not do this as BitBake does not schedule the package index for after the completion of the package you are building. Consequently, you cannot be sure of the package index including information for the package you just built. Thus, be sure to run the package update step separately after building any packages.
You can use the PACKAGE_FEED_ARCHS, PACKAGE_FEED_BASE_PATHS, and PACKAGE_FEED_URIS variables to pre-configure target images to use a package feed. If you do not define these variables, then manual steps as described in the subsequent sections are necessary to configure the target. You should set these variables before building the image in order to produce a correctly configured image.
When your build is complete, your packages reside in the
${TMPDIR}/deploy/packageformat directory. For example, if
${TMPDIR} is
tmp and your selected package type is RPM, then your RPM packages
are available in tmp/deploy/rpm.
3.22.4.2 Host or Server Machine Setup
Although other protocols are possible, a server using HTTP typically serves packages. If you want to use HTTP, then set up and configure a web server such as Apache 2, lighttpd, or Python web server on the machine serving the packages.
To keep things simple, this section describes how to set up a Python web server to share package feeds from the developer’s machine. Although this server might not be the best for a production environment, the setup is simple and straight forward. Should you want to use a different server more suited for production (e.g. Apache 2, Lighttpd, or Nginx), take the appropriate steps to do so.
From within the build directory where you have built an image based on
your packaging choice (i.e. the
PACKAGE_CLASSES
setting), simply start the server. The following example assumes a build
directory of ~/poky/build/tmp/deploy/rpm and a PACKAGE_CLASSES
setting of “package_rpm”:
$ cd ~/poky/build/tmp/deploy/rpm
$ python3 -m http.server
3.22.4.3 Target Setup
Setting up the target differs depending on the package management system. This section provides information for RPM, IPK, and DEB.
3.22.4.3.1 Using RPM
The Dandified Packaging
Tool (DNF) performs
runtime package management of RPM packages. In order to use DNF for
runtime package management, you must perform an initial setup on the
target machine for cases where the PACKAGE_FEED_* variables were not
set as part of the image that is running on the target. This means if
you built your image and did not not use these variables as part of the
build and your image is now running on the target, you need to perform
the steps in this section if you want to use runtime package management.
Note
For information on the PACKAGE_FEED_* variables, see
PACKAGE_FEED_ARCHS, PACKAGE_FEED_BASE_PATHS, and
PACKAGE_FEED_URIS in the Yocto Project Reference Manual variables
glossary.
On the target, you must inform DNF that package databases are available.
You do this by creating a file named
/etc/yum.repos.d/oe-packages.repo and defining the oe-packages.
As an example, assume the target is able to use the following package
databases: all, i586, and qemux86 from a server named
my.server. The specifics for setting up the web server are up to
you. The critical requirement is that the URIs in the target repository
configuration point to the correct remote location for the feeds.
Note
For development purposes, you can point the web server to the build
system’s deploy directory. However, for production use, it is better to
copy the package directories to a location outside of the build area and use
that location. Doing so avoids situations where the build system
overwrites or changes the deploy directory.
When telling DNF where to look for the package databases, you must declare individual locations per architecture or a single location used for all architectures. You cannot do both:
Create an Explicit List of Architectures: Define individual base URLs to identify where each package database is located:
[oe-packages] baseurl=http://my.server/rpm/i586 http://my.server/rpm/qemux86 http://my.server/rpm/all
This example informs DNF about individual package databases for all three architectures.
Create a Single (Full) Package Index: Define a single base URL that identifies where a full package database is located:
[oe-packages] baseurl=http://my.server/rpm
This example informs DNF about a single package database that contains all the package index information for all supported architectures.
Once you have informed DNF where to find the package databases, you need to fetch them:
# dnf makecache
DNF is now able to find, install, and upgrade packages from the specified repository or repositories.
Note
See the DNF documentation for additional information.
3.22.4.3.2 Using IPK
The opkg application performs runtime package management of IPK
packages. You must perform an initial setup for opkg on the target
machine if the
PACKAGE_FEED_ARCHS,
PACKAGE_FEED_BASE_PATHS,
and
PACKAGE_FEED_URIS
variables have not been set or the target image was built before the
variables were set.
The opkg application uses configuration files to find available
package databases. Thus, you need to create a configuration file inside
the /etc/opkg/ direction, which informs opkg of any repository
you want to use.
As an example, suppose you are serving packages from a ipk/
directory containing the i586, all, and qemux86 databases
through an HTTP server named my.server. On the target, create a
configuration file (e.g. my_repo.conf) inside the /etc/opkg/
directory containing the following:
src/gz all http://my.server/ipk/all
src/gz i586 http://my.server/ipk/i586
src/gz qemux86 http://my.server/ipk/qemux86
Next, instruct opkg to fetch the
repository information:
# opkg update
The opkg application is now able to find, install, and upgrade packages
from the specified repository.
3.22.4.3.3 Using DEB
The apt application performs runtime package management of DEB
packages. This application uses a source list file to find available
package databases. You must perform an initial setup for apt on the
target machine if the
PACKAGE_FEED_ARCHS,
PACKAGE_FEED_BASE_PATHS,
and
PACKAGE_FEED_URIS
variables have not been set or the target image was built before the
variables were set.
To inform apt of the repository you want to use, you might create a
list file (e.g. my_repo.list) inside the
/etc/apt/sources.list.d/ directory. As an example, suppose you are
serving packages from a deb/ directory containing the i586,
all, and qemux86 databases through an HTTP server named
my.server. The list file should contain:
deb http://my.server/deb/all ./
deb http://my.server/deb/i586 ./
deb http://my.server/deb/qemux86 ./
Next, instruct the apt application
to fetch the repository information:
# apt-get update
After this step,
apt is able to find, install, and upgrade packages from the
specified repository.
3.22.5 Generating and Using Signed Packages
In order to add security to RPM packages used during a build, you can take steps to securely sign them. Once a signature is verified, the OpenEmbedded build system can use the package in the build. If security fails for a signed package, the build system aborts the build.
This section describes how to sign RPM packages during a build and how to use signed package feeds (repositories) when doing a build.
3.22.5.1 Signing RPM Packages
To enable signing RPM packages, you must set up the following
configurations in either your local.config or distro.config
file:
# Inherit sign_rpm.bbclass to enable signing functionality
INHERIT += " sign_rpm"
# Define the GPG key that will be used for signing.
RPM_GPG_NAME = "key_name"
# Provide passphrase for the key
RPM_GPG_PASSPHRASE = "passphrase"
Note
Be sure to supply appropriate values for both key_name and passphrase.
Aside from the RPM_GPG_NAME and RPM_GPG_PASSPHRASE variables in
the previous example, two optional variables related to signing exist:
GPG_BIN: Specifies a
gpgbinary/wrapper that is executed when the package is signed.GPG_PATH: Specifies the
gpghome directory used when the package is signed.
3.22.5.2 Processing Package Feeds
In addition to being able to sign RPM packages, you can also enable signed package feeds for IPK and RPM packages.
The steps you need to take to enable signed package feed use are similar
to the steps used to sign RPM packages. You must define the following in
your local.config or distro.config file:
INHERIT += "sign_package_feed"
PACKAGE_FEED_GPG_NAME = "key_name"
PACKAGE_FEED_GPG_PASSPHRASE_FILE = "path_to_file_containing_passphrase"
For signed package feeds, the passphrase must exist in a separate file,
which is pointed to by the PACKAGE_FEED_GPG_PASSPHRASE_FILE
variable. Regarding security, keeping a plain text passphrase out of the
configuration is more secure.
Aside from the PACKAGE_FEED_GPG_NAME and
PACKAGE_FEED_GPG_PASSPHRASE_FILE variables, three optional variables
related to signed package feeds exist:
GPG_BIN Specifies a
gpgbinary/wrapper that is executed when the package is signed.GPG_PATH: Specifies the
gpghome directory used when the package is signed.PACKAGE_FEED_GPG_SIGNATURE_TYPE: Specifies the type of
gpgsignature. This variable applies only to RPM and IPK package feeds. Allowable values for thePACKAGE_FEED_GPG_SIGNATURE_TYPEare “ASC”, which is the default and specifies ascii armored, and “BIN”, which specifies binary.
3.22.6 Testing Packages With ptest
A Package Test (ptest) runs tests against packages built by the
OpenEmbedded build system on the target machine. A ptest contains at
least two items: the actual test, and a shell script (run-ptest)
that starts the test. The shell script that starts the test must not
contain the actual test - the script only starts the test. On the other
hand, the test can be anything from a simple shell script that runs a
binary and checks the output to an elaborate system of test binaries and
data files.
The test generates output in the format used by Automake:
result: testname
where the result can be PASS, FAIL, or SKIP, and
the testname can be any identifying string.
For a list of Yocto Project recipes that are already enabled with ptest, see the Ptest wiki page.
Note
A recipe is “ptest-enabled” if it inherits the ptest class.
3.22.6.1 Adding ptest to Your Build
To add package testing to your build, add the
DISTRO_FEATURES and
EXTRA_IMAGE_FEATURES
variables to your local.conf file, which is found in the
Build Directory:
DISTRO_FEATURES_append = " ptest"
EXTRA_IMAGE_FEATURES += "ptest-pkgs"
Once your build is complete, the ptest files are installed into the
/usr/lib/package/ptest directory within the image, where package
is the name of the package.
3.22.6.2 Running ptest
The ptest-runner package installs a shell script that loops through
all installed ptest test suites and runs them in sequence. Consequently,
you might want to add this package to your image.
3.22.6.3 Getting Your Package Ready
In order to enable a recipe to run installed ptests on target hardware, you need to prepare the recipes that build the packages you want to test. Here is what you have to do for each recipe:
Be sure the recipe inherits the ptest class: Include the following line in each recipe:
inherit ptest
Create run-ptest: This script starts your test. Locate the script where you will refer to it using SRC_URI. Here is an example that starts a test for
dbus:#!/bin/sh cd test make -k runtest-TESTS
Ensure dependencies are met: If the test adds build or runtime dependencies that normally do not exist for the package (such as requiring “make” to run the test suite), use the DEPENDS and RDEPENDS variables in your recipe in order for the package to meet the dependencies. Here is an example where the package has a runtime dependency on “make”:
RDEPENDS_${PN}-ptest += "make"Add a function to build the test suite: Not many packages support cross-compilation of their test suites. Consequently, you usually need to add a cross-compilation function to the package.
Many packages based on Automake compile and run the test suite by using a single command such as
make check. However, the hostmake checkbuilds and runs on the same computer, while cross-compiling requires that the package is built on the host but executed for the target architecture (though often, as in the case for ptest, the execution occurs on the host). The built version of Automake that ships with the Yocto Project includes a patch that separates building and execution. Consequently, packages that use the unaltered, patched version ofmake checkautomatically cross-compiles.Regardless, you still must add a
do_compile_ptestfunction to build the test suite. Add a function similar to the following to your recipe:do_compile_ptest() { oe_runmake buildtest-TESTS }
Ensure special configurations are set: If the package requires special configurations prior to compiling the test code, you must insert a
do_configure_ptestfunction into the recipe.Install the test suite: The
ptestclass automatically copies the filerun-ptestto the target and then runs makeinstall-ptestto run the tests. If this is not enough, you need to create ado_install_ptestfunction and make sure it gets called after the “make install-ptest” completes.
3.22.7 Creating Node Package Manager (NPM) Packages
NPM is a package manager for the JavaScript programming language. The Yocto Project supports the NPM fetcher. You can use this fetcher in combination with devtool to create recipes that produce NPM packages.
Two workflows exist that allow you to create NPM packages using
devtool: the NPM registry modules method and the NPM project code
method.
Note
While it is possible to create NPM recipes manually, using
devtool is far simpler.
Additionally, some requirements and caveats exist.
3.22.7.1 Requirements and Caveats
You need to be aware of the following before using devtool to create
NPM packages:
Of the two methods that you can use
devtoolto create NPM packages, the registry approach is slightly simpler. However, you might consider the project approach because you do not have to publish your module in the NPM registry (npm-registry), which is NPM’s public registry.Be familiar with devtool.
The NPM host tools need the native
nodejs-npmpackage, which is part of the OpenEmbedded environment. You need to get the package by cloning the https://github.com/openembedded/meta-openembedded repository out of GitHub. Be sure to add the path to your local copy to yourbblayers.conffile.devtoolcannot detect native libraries in module dependencies. Consequently, you must manually add packages to your recipe.While deploying NPM packages,
devtoolcannot determine which dependent packages are missing on the target (e.g. the node runtimenodejs). Consequently, you need to find out what files are missing and be sure they are on the target.Although you might not need NPM to run your node package, it is useful to have NPM on your target. The NPM package name is
nodejs-npm.
3.22.7.2 Using the Registry Modules Method
This section presents an example that uses the cute-files module,
which is a file browser web application.
Note
You must know the cute-files module version.
The first thing you need to do is use devtool and the NPM fetcher to
create the recipe:
$ devtool add "npm://registry.npmjs.org;package=cute-files;version=1.0.2"
The
devtool add command runs recipetool create and uses the same
fetch URI to download each dependency and capture license details where
possible. The result is a generated recipe.
The recipe file is fairly simple and contains every license that
recipetool finds and includes the licenses in the recipe’s
LIC_FILES_CHKSUM
variables. You need to examine the variables and look for those with
“unknown” in the LICENSE
field. You need to track down the license information for “unknown”
modules and manually add the information to the recipe.
recipetool creates a “shrinkwrap” file for your recipe. Shrinkwrap
files capture the version of all dependent modules. Many packages do not
provide shrinkwrap files. recipetool create a shrinkwrap file as it
runs.
Note
A package is created for each sub-module. This policy is the only practical way to have the licenses for all of the dependencies represented in the license manifest of the image.
The devtool edit-recipe command lets you take a look at the recipe:
$ devtool edit-recipe cute-files
SUMMARY = "Turn any folder on your computer into a cute file browser, available on the local network."
LICENSE = "MIT & ISC & Unknown"
LIC_FILES_CHKSUM = "file://LICENSE;md5=71d98c0a1db42956787b1909c74a86ca \
file://node_modules/toidentifier/LICENSE;md5=1a261071a044d02eb6f2bb47f51a3502 \
file://node_modules/debug/LICENSE;md5=ddd815a475e7338b0be7a14d8ee35a99 \
...
SRC_URI = " \
npm://registry.npmjs.org/;package=cute-files;version=${PV} \
npmsw://${THISDIR}/${BPN}/npm-shrinkwrap.json \
"
S = "${WORKDIR}/npm"
inherit npm LICENSE_${PN} = "MIT"
LICENSE_${PN}-accepts = "MIT"
LICENSE_${PN}-array-flatten = "MIT"
...
LICENSE_${PN}-vary = "MIT"
Three key points exist in the previous example:
SRC_URI uses the NPM scheme so that the NPM fetcher is used.
recipetoolcollects all the license information. If a sub-module’s license is unavailable, the sub-module’s name appears in the comments.The
inherit npmstatement causes the npm class to package up all the modules.
You can run the following command to build the cute-files package:
$ devtool build cute-files
Remember that nodejs must be installed on
the target before your package.
Assuming 192.168.7.2 for the target’s IP address, use the following command to deploy your package:
$ devtool deploy-target -s cute-files root@192.168.7.2
Once the package is installed on the target, you can test the application:
Note
Because of a known issue, you cannot simply run cute-files as you would
if you had run npm install.
$ cd /usr/lib/node_modules/cute-files
$ node cute-files.js
On a browser,
go to http://192.168.7.2:3000 and you see the following:
You can find the recipe in workspace/recipes/cute-files. You can use
the recipe in any layer you choose.
3.22.7.3 Using the NPM Projects Code Method
Although it is useful to package modules already in the NPM registry,
adding node.js projects under development is a more common developer
use case.
This section covers the NPM projects code method, which is very similar
to the “registry” approach described in the previous section. In the NPM
projects method, you provide devtool with an URL that points to the
source files.
Replicating the same example, (i.e. cute-files) use the following
command:
$ devtool add https://github.com/martinaglv/cute-files.git
The
recipe this command generates is very similar to the recipe created in
the previous section. However, the SRC_URI looks like the following:
SRC_URI = " \
git://github.com/martinaglv/cute-files.git;protocol=https \
npmsw://${THISDIR}/${BPN}/npm-shrinkwrap.json \
"
In this example, the main module is taken from the Git repository and dependencies are taken from the NPM registry. Other than those differences, the recipe is basically the same between the two methods. You can build and deploy the package exactly as described in the previous section that uses the registry modules method.
3.22.8 Adding custom metadata to packages
The variable PACKAGE_ADD_METADATA can be used to add additional metadata to packages. This is reflected in the package control/spec file. To take the ipk format for example, the CONTROL file stored inside would contain the additional metadata as additional lines.
The variable can be used in multiple ways, including using suffixes to set it for a specific package type and/or package. Note that the order of precedence is the same as this list:
PACKAGE_ADD_METADATA_<PKGTYPE>_<PN>PACKAGE_ADD_METADATA_<PKGTYPE>PACKAGE_ADD_METADATA_<PN>PACKAGE_ADD_METADATA
<PKGTYPE> is a parameter and expected to be a distinct name of specific package type:
IPK for .ipk packages
DEB for .deb packages
RPM for .rpm packages
<PN> is a parameter and expected to be a package name.
The variable can contain multiple [one-line] metadata fields separated
by the literal sequence ‘\n’. The separator can be redefined using the
variable flag separator.
The following is an example that adds two custom fields for ipk packages:
PACKAGE_ADD_METADATA_IPK = "Vendor: CustomIpk\nGroup:Applications/Spreadsheets"
3.23 Efficiently Fetching Source Files During a Build
The OpenEmbedded build system works with source files located through the SRC_URI variable. When you build something using BitBake, a big part of the operation is locating and downloading all the source tarballs. For images, downloading all the source for various packages can take a significant amount of time.
This section shows you how you can use mirrors to speed up fetching source files and how you can pre-fetch files all of which leads to more efficient use of resources and time.
3.23.1 Setting up Effective Mirrors
A good deal that goes into a Yocto Project build is simply downloading all of the source tarballs. Maybe you have been working with another build system (OpenEmbedded or Angstrom) for which you have built up a sizable directory of source tarballs. Or, perhaps someone else has such a directory for which you have read access. If so, you can save time by adding statements to your configuration file so that the build process checks local directories first for existing tarballs before checking the Internet.
Here is an efficient way to set it up in your local.conf file:
SOURCE_MIRROR_URL ?= "file:///home/you/your-download-dir/"
INHERIT += "own-mirrors"
BB_GENERATE_MIRROR_TARBALLS = "1"
# BB_NO_NETWORK = "1"
In the previous example, the BB_GENERATE_MIRROR_TARBALLS variable causes the OpenEmbedded build system to generate tarballs of the Git repositories and store them in the DL_DIR directory. Due to performance reasons, generating and storing these tarballs is not the build system’s default behavior.
You can also use the PREMIRRORS variable. For an example, see the variable’s glossary entry in the Yocto Project Reference Manual.
3.23.2 Getting Source Files and Suppressing the Build
Another technique you can use to ready yourself for a successive string of build operations, is to pre-fetch all the source files without actually starting a build. This technique lets you work through any download issues and ultimately gathers all the source files into your download directory build/downloads/, which is located with DL_DIR.
Use the following BitBake command form to fetch all the necessary sources without starting the build:
$ bitbake target --runall=fetch
This variation of the BitBake command guarantees that you have all the sources for that BitBake target should you disconnect from the Internet and want to do the build later offline.
3.24 Selecting an Initialization Manager
By default, the Yocto Project uses SysVinit as the initialization manager. However, support also exists for systemd, which is a full replacement for init with parallel starting of services, reduced shell overhead and other features that are used by many distributions.
Within the system, SysVinit treats system components as services. These
services are maintained as shell scripts stored in the /etc/init.d/
directory. Services organize into different run levels. This
organization is maintained by putting links to the services in the
/etc/rcN.d/ directories, where N/ is one of the following options:
“S”, “0”, “1”, “2”, “3”, “4”, “5”, or “6”.
Note
Each runlevel has a dependency on the previous runlevel. This dependency allows the services to work properly.
In comparison, systemd treats components as units. Using units is a broader concept as compared to using a service. A unit includes several different types of entities. Service is one of the types of entities. The runlevel concept in SysVinit corresponds to the concept of a target in systemd, where target is also a type of supported unit.
In a SysVinit-based system, services load sequentially (i.e. one by one) during init and parallelization is not supported. With systemd, services start in parallel. Needless to say, the method can have an impact on system startup performance.
If you want to use SysVinit, you do not have to do anything. But, if you want to use systemd, you must take some steps as described in the following sections.
3.24.1 Using systemd Exclusively
Set these variables in your distribution configuration file as follows:
DISTRO_FEATURES_append = " systemd"
VIRTUAL-RUNTIME_init_manager = "systemd"
You can also prevent the SysVinit distribution feature from being automatically enabled as follows:
DISTRO_FEATURES_BACKFILL_CONSIDERED = "sysvinit"
Doing so removes any redundant SysVinit scripts.
To remove initscripts from your image altogether, set this variable also:
VIRTUAL-RUNTIME_initscripts = ""
For information on the backfill variable, see DISTRO_FEATURES_BACKFILL_CONSIDERED.
3.24.2 Using systemd for the Main Image and Using SysVinit for the Rescue Image
Set these variables in your distribution configuration file as follows:
DISTRO_FEATURES_append = " systemd"
VIRTUAL-RUNTIME_init_manager = "systemd"
Doing so causes your main image to use the
packagegroup-core-boot.bb recipe and systemd. The rescue/minimal
image cannot use this package group. However, it can install SysVinit
and the appropriate packages will have support for both systemd and
SysVinit.
3.25 Selecting a Device Manager
The Yocto Project provides multiple ways to manage the device manager
(/dev):
Persistent and Pre-Populated
/dev: For this case, the/devdirectory is persistent and the required device nodes are created during the build.Use
devtmpfswith a Device Manager: For this case, the/devdirectory is provided by the kernel as an in-memory file system and is automatically populated by the kernel at runtime. Additional configuration of device nodes is done in user space by a device manager likeudevorbusybox-mdev.
3.25.1 Using Persistent and Pre-Populated/dev
To use the static method for device population, you need to set the USE_DEVFS variable to “0” as follows:
USE_DEVFS = "0"
The content of the resulting /dev directory is defined in a Device
Table file. The
IMAGE_DEVICE_TABLES
variable defines the Device Table to use and should be set in the
machine or distro configuration file. Alternatively, you can set this
variable in your local.conf configuration file.
If you do not define the IMAGE_DEVICE_TABLES variable, the default
device_table-minimal.txt is used:
IMAGE_DEVICE_TABLES = "device_table-mymachine.txt"
The population is handled by the makedevs utility during image
creation:
3.25.2 Using devtmpfs and a Device Manager
To use the dynamic method for device population, you need to use (or be sure to set) the USE_DEVFS variable to “1”, which is the default:
USE_DEVFS = "1"
With this
setting, the resulting /dev directory is populated by the kernel
using devtmpfs. Make sure the corresponding kernel configuration
variable CONFIG_DEVTMPFS is set when building you build a Linux
kernel.
All devices created by devtmpfs will be owned by root and have
permissions 0600.
To have more control over the device nodes, you can use a device manager
like udev or busybox-mdev. You choose the device manager by
defining the VIRTUAL-RUNTIME_dev_manager variable in your machine or
distro configuration file. Alternatively, you can set this variable in
your local.conf configuration file:
VIRTUAL-RUNTIME_dev_manager = "udev"
# Some alternative values
# VIRTUAL-RUNTIME_dev_manager = "busybox-mdev"
# VIRTUAL-RUNTIME_dev_manager = "systemd"
3.26 Using an External SCM
If you’re working on a recipe that pulls from an external Source Code Manager (SCM), it is possible to have the OpenEmbedded build system notice new recipe changes added to the SCM and then build the resulting packages that depend on the new recipes by using the latest versions. This only works for SCMs from which it is possible to get a sensible revision number for changes. Currently, you can do this with Apache Subversion (SVN), Git, and Bazaar (BZR) repositories.
To enable this behavior, the PV of the recipe needs to reference SRCPV. Here is an example:
PV = "1.2.3+git${SRCPV}"
Then, you can add the following to your
local.conf:
SRCREV_pn-PN = "${AUTOREV}"
PN is the name of the recipe for which you want to enable automatic source revision updating.
If you do not want to update your local configuration file, you can add the following directly to the recipe to finish enabling the feature:
SRCREV = "${AUTOREV}"
The Yocto Project provides a distribution named poky-bleeding, whose
configuration file contains the line:
require conf/distro/include/poky-floating-revisions.inc
This line pulls in the listed include file that contains numerous lines of exactly that form:
#SRCREV_pn-opkg-native ?= "${AUTOREV}"
#SRCREV_pn-opkg-sdk ?= "${AUTOREV}"
#SRCREV_pn-opkg ?= "${AUTOREV}"
#SRCREV_pn-opkg-utils-native ?= "${AUTOREV}"
#SRCREV_pn-opkg-utils ?= "${AUTOREV}"
SRCREV_pn-gconf-dbus ?= "${AUTOREV}"
SRCREV_pn-matchbox-common ?= "${AUTOREV}"
SRCREV_pn-matchbox-config-gtk ?= "${AUTOREV}"
SRCREV_pn-matchbox-desktop ?= "${AUTOREV}"
SRCREV_pn-matchbox-keyboard ?= "${AUTOREV}"
SRCREV_pn-matchbox-panel-2 ?= "${AUTOREV}"
SRCREV_pn-matchbox-themes-extra ?= "${AUTOREV}"
SRCREV_pn-matchbox-terminal ?= "${AUTOREV}"
SRCREV_pn-matchbox-wm ?= "${AUTOREV}"
SRCREV_pn-settings-daemon ?= "${AUTOREV}"
SRCREV_pn-screenshot ?= "${AUTOREV}"
. . .
These lines allow you to experiment with building a distribution that tracks the latest development source for numerous packages.
Note
The poky-bleeding distribution is not tested on a regular basis. Keep
this in mind if you use it.
3.27 Creating a Read-Only Root Filesystem
Suppose, for security reasons, you need to disable your target device’s root filesystem’s write permissions (i.e. you need a read-only root filesystem). Or, perhaps you are running the device’s operating system from a read-only storage device. For either case, you can customize your image for that behavior.
Note
Supporting a read-only root filesystem requires that the system and applications do not try to write to the root filesystem. You must configure all parts of the target system to write elsewhere, or to gracefully fail in the event of attempting to write to the root filesystem.
3.27.1 Creating the Root Filesystem
To create the read-only root filesystem, simply add the
“read-only-rootfs” feature to your image, normally in one of two ways.
The first way is to add the “read-only-rootfs” image feature in the
image’s recipe file via the IMAGE_FEATURES variable:
IMAGE_FEATURES += "read-only-rootfs"
As an alternative, you can add the same feature
from within your build directory’s local.conf file with the
associated EXTRA_IMAGE_FEATURES variable, as in:
EXTRA_IMAGE_FEATURES = "read-only-rootfs"
For more information on how to use these variables, see the “Customizing Images Using Custom IMAGE_FEATURES and EXTRA_IMAGE_FEATURES” section. For information on the variables, see IMAGE_FEATURES and EXTRA_IMAGE_FEATURES.
3.27.2 Post-Installation Scripts and Read-Only Root Filesystem
It is very important that you make sure all post-Installation
(pkg_postinst) scripts for packages that are installed into the
image can be run at the time when the root filesystem is created during
the build on the host system. These scripts cannot attempt to run during
first-boot on the target device. With the “read-only-rootfs” feature
enabled, the build system checks during root filesystem creation to make
sure all post-installation scripts succeed. If any of these scripts
still need to be run after the root filesystem is created, the build
immediately fails. These build-time checks ensure that the build fails
rather than the target device fails later during its initial boot
operation.
Most of the common post-installation scripts generated by the build system for the out-of-the-box Yocto Project are engineered so that they can run during root filesystem creation (e.g. post-installation scripts for caching fonts). However, if you create and add custom scripts, you need to be sure they can be run during this file system creation.
Here are some common problems that prevent post-installation scripts from running during root filesystem creation:
Not using $D in front of absolute paths: The build system defines
$D when the root filesystem is created. Furthermore,$Dis blank when the script is run on the target device. This implies two purposes for$D: ensuring paths are valid in both the host and target environments, and checking to determine which environment is being used as a method for taking appropriate actions.Attempting to run processes that are specific to or dependent on the target architecture: You can work around these attempts by using native tools, which run on the host system, to accomplish the same tasks, or by alternatively running the processes under QEMU, which has the
qemu_run_binaryfunction. For more information, see the qemu class.
3.27.3 Areas With Write Access
With the “read-only-rootfs” feature enabled, any attempt by the target
to write to the root filesystem at runtime fails. Consequently, you must
make sure that you configure processes and applications that attempt
these types of writes do so to directories with write access (e.g.
/tmp or /var/run).
3.28 Maintaining Build Output Quality
Many factors can influence the quality of a build. For example, if you upgrade a recipe to use a new version of an upstream software package or you experiment with some new configuration options, subtle changes can occur that you might not detect until later. Consider the case where your recipe is using a newer version of an upstream package. In this case, a new version of a piece of software might introduce an optional dependency on another library, which is auto-detected. If that library has already been built when the software is building, the software will link to the built library and that library will be pulled into your image along with the new software even if you did not want the library.
The buildhistory class exists to help you maintain the quality of your build output. You can use the class to highlight unexpected and possibly unwanted changes in the build output. When you enable build history, it records information about the contents of each package and image and then commits that information to a local Git repository where you can examine the information.
The remainder of this section describes the following:
3.28.1 Enabling and Disabling Build History
Build history is disabled by default. To enable it, add the following
INHERIT statement and set the
BUILDHISTORY_COMMIT
variable to “1” at the end of your conf/local.conf file found in the
Build Directory:
INHERIT += "buildhistory"
BUILDHISTORY_COMMIT = "1"
Enabling build history as previously described causes the OpenEmbedded build system to collect build output information and commit it as a single commit to a local Git repository.
Note
Enabling build history increases your build times slightly, particularly for images, and increases the amount of disk space used during the build.
You can disable build history by removing the previous statements from
your conf/local.conf file.
3.28.2 Understanding What the Build History Contains
Build history information is kept in
${TOPDIR}/buildhistory
in the Build Directory as defined by the
BUILDHISTORY_DIR
variable. The following is an example abbreviated listing:
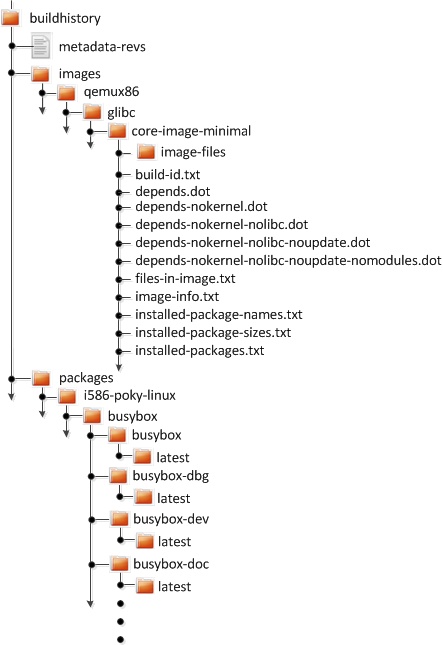
At the top level, a metadata-revs file exists that lists the
revisions of the repositories for the enabled layers when the build was
produced. The rest of the data splits into separate packages,
images and sdk directories, the contents of which are described
as follows.
3.28.2.1 Build History Package Information
The history for each package contains a text file that has name-value
pairs with information about the package. For example,
buildhistory/packages/i586-poky-linux/busybox/busybox/latest
contains the following:
PV = 1.22.1
PR = r32
RPROVIDES =
RDEPENDS = glibc (>= 2.20) update-alternatives-opkg
RRECOMMENDS = busybox-syslog busybox-udhcpc update-rc.d
PKGSIZE = 540168
FILES = /usr/bin/* /usr/sbin/* /usr/lib/busybox/* /usr/lib/lib*.so.* \
/etc /com /var /bin/* /sbin/* /lib/*.so.* /lib/udev/rules.d \
/usr/lib/udev/rules.d /usr/share/busybox /usr/lib/busybox/* \
/usr/share/pixmaps /usr/share/applications /usr/share/idl \
/usr/share/omf /usr/share/sounds /usr/lib/bonobo/servers
FILELIST = /bin/busybox /bin/busybox.nosuid /bin/busybox.suid /bin/sh \
/etc/busybox.links.nosuid /etc/busybox.links.suid
Most of these
name-value pairs correspond to variables used to produce the package.
The exceptions are FILELIST, which is the actual list of files in
the package, and PKGSIZE, which is the total size of files in the
package in bytes.
A file also exists that corresponds to the recipe from which the package
came (e.g. buildhistory/packages/i586-poky-linux/busybox/latest):
PV = 1.22.1
PR = r32
DEPENDS = initscripts kern-tools-native update-rc.d-native \
virtual/i586-poky-linux-compilerlibs virtual/i586-poky-linux-gcc \
virtual/libc virtual/update-alternatives
PACKAGES = busybox-ptest busybox-httpd busybox-udhcpd busybox-udhcpc \
busybox-syslog busybox-mdev busybox-hwclock busybox-dbg \
busybox-staticdev busybox-dev busybox-doc busybox-locale busybox
Finally, for those recipes fetched from a version control system (e.g.,
Git), a file exists that lists source revisions that are specified in
the recipe and lists the actual revisions used during the build. Listed
and actual revisions might differ when
SRCREV is set to
${AUTOREV}. Here is an
example assuming
buildhistory/packages/qemux86-poky-linux/linux-yocto/latest_srcrev):
# SRCREV_machine = "38cd560d5022ed2dbd1ab0dca9642e47c98a0aa1"
SRCREV_machine = "38cd560d5022ed2dbd1ab0dca9642e47c98a0aa1"
# SRCREV_meta = "a227f20eff056e511d504b2e490f3774ab260d6f"
SRCREV_meta ="a227f20eff056e511d504b2e490f3774ab260d6f"
You can use the
buildhistory-collect-srcrevs command with the -a option to
collect the stored SRCREV values from build history and report them
in a format suitable for use in global configuration (e.g.,
local.conf or a distro include file) to override floating
AUTOREV values to a fixed set of revisions. Here is some example
output from this command:
$ buildhistory-collect-srcrevs -a
# i586-poky-linux
SRCREV_pn-glibc = "b8079dd0d360648e4e8de48656c5c38972621072"
SRCREV_pn-glibc-initial = "b8079dd0d360648e4e8de48656c5c38972621072"
SRCREV_pn-opkg-utils = "53274f087565fd45d8452c5367997ba6a682a37a"
SRCREV_pn-kmod = "fd56638aed3fe147015bfa10ed4a5f7491303cb4"
# x86_64-linux
SRCREV_pn-gtk-doc-stub-native = "1dea266593edb766d6d898c79451ef193eb17cfa"
SRCREV_pn-dtc-native = "65cc4d2748a2c2e6f27f1cf39e07a5dbabd80ebf"
SRCREV_pn-update-rc.d-native = "eca680ddf28d024954895f59a241a622dd575c11"
SRCREV_glibc_pn-cross-localedef-native = "b8079dd0d360648e4e8de48656c5c38972621072"
SRCREV_localedef_pn-cross-localedef-native = "c833367348d39dad7ba018990bfdaffaec8e9ed3"
SRCREV_pn-prelink-native = "faa069deec99bf61418d0bab831c83d7c1b797ca"
SRCREV_pn-opkg-utils-native = "53274f087565fd45d8452c5367997ba6a682a37a"
SRCREV_pn-kern-tools-native = "23345b8846fe4bd167efdf1bd8a1224b2ba9a5ff"
SRCREV_pn-kmod-native = "fd56638aed3fe147015bfa10ed4a5f7491303cb4"
# qemux86-poky-linux
SRCREV_machine_pn-linux-yocto = "38cd560d5022ed2dbd1ab0dca9642e47c98a0aa1"
SRCREV_meta_pn-linux-yocto = "a227f20eff056e511d504b2e490f3774ab260d6f"
# all-poky-linux
SRCREV_pn-update-rc.d = "eca680ddf28d024954895f59a241a622dd575c11"
Note
Here are some notes on using the buildhistory-collect-srcrevs command:
By default, only values where the
SRCREVwas not hardcoded (usually whenAUTOREVis used) are reported. Use the-aoption to see allSRCREVvalues.The output statements might not have any effect if overrides are applied elsewhere in the build system configuration. Use the
-foption to add theforcevariableoverride to each output line if you need to work around this restriction.The script does apply special handling when building for multiple machines. However, the script does place a comment before each set of values that specifies which triplet to which they belong as previously shown (e.g.,
i586-poky-linux).
3.28.2.2 Build History Image Information
The files produced for each image are as follows:
image-files:A directory containing selected files from the root filesystem. The files are defined by BUILDHISTORY_IMAGE_FILES.build-id.txt:Human-readable information about the build configuration and metadata source revisions. This file contains the full build header as printed by BitBake.*.dot:Dependency graphs for the image that are compatible withgraphviz.files-in-image.txt:A list of files in the image with permissions, owner, group, size, and symlink information.image-info.txt:A text file containing name-value pairs with information about the image. See the following listing example for more information.installed-package-names.txt:A list of installed packages by name only.installed-package-sizes.txt:A list of installed packages ordered by size.installed-packages.txt:A list of installed packages with full package filenames.
Note
Installed package information is able to be gathered and produced even if package management is disabled for the final image.
Here is an example of image-info.txt:
DISTRO = poky
DISTRO_VERSION = 1.7
USER_CLASSES = buildstats image-mklibs image-prelink
IMAGE_CLASSES = image_types
IMAGE_FEATURES = debug-tweaks
IMAGE_LINGUAS =
IMAGE_INSTALL = packagegroup-core-boot run-postinsts
BAD_RECOMMENDATIONS =
NO_RECOMMENDATIONS =
PACKAGE_EXCLUDE =
ROOTFS_POSTPROCESS_COMMAND = write_package_manifest; license_create_manifest; \
write_image_manifest ; buildhistory_list_installed_image ; \
buildhistory_get_image_installed ; ssh_allow_empty_password; \
postinst_enable_logging; rootfs_update_timestamp ; ssh_disable_dns_lookup ;
IMAGE_POSTPROCESS_COMMAND = buildhistory_get_imageinfo ;
IMAGESIZE = 6900
Other than IMAGESIZE,
which is the total size of the files in the image in Kbytes, the
name-value pairs are variables that may have influenced the content of
the image. This information is often useful when you are trying to
determine why a change in the package or file listings has occurred.
3.28.2.3 Using Build History to Gather Image Information Only
As you can see, build history produces image information, including
dependency graphs, so you can see why something was pulled into the
image. If you are just interested in this information and not interested
in collecting specific package or SDK information, you can enable
writing only image information without any history by adding the
following to your conf/local.conf file found in the
Build Directory:
INHERIT += "buildhistory"
BUILDHISTORY_COMMIT = "0"
BUILDHISTORY_FEATURES = "image"
Here, you set the BUILDHISTORY_FEATURES variable to use the image feature only.
3.28.2.4 Build History SDK Information
Build history collects similar information on the contents of SDKs (e.g.
bitbake -c populate_sdk imagename) as compared to information it
collects for images. Furthermore, this information differs depending on
whether an extensible or standard SDK is being produced.
The following list shows the files produced for SDKs:
files-in-sdk.txt:A list of files in the SDK with permissions, owner, group, size, and symlink information. This list includes both the host and target parts of the SDK.sdk-info.txt:A text file containing name-value pairs with information about the SDK. See the following listing example for more information.sstate-task-sizes.txt:A text file containing name-value pairs with information about task group sizes (e.g.do_populate_sysroottasks have a total size). Thesstate-task-sizes.txtfile exists only when an extensible SDK is created.sstate-package-sizes.txt:A text file containing name-value pairs with information for the shared-state packages and sizes in the SDK. Thesstate-package-sizes.txtfile exists only when an extensible SDK is created.sdk-files:A folder that contains copies of the files mentioned inBUILDHISTORY_SDK_FILESif the files are present in the output. Additionally, the default value ofBUILDHISTORY_SDK_FILESis specific to the extensible SDK although you can set it differently if you would like to pull in specific files from the standard SDK.The default files are
conf/local.conf,conf/bblayers.conf,conf/auto.conf,conf/locked-sigs.inc, andconf/devtool.conf. Thus, for an extensible SDK, these files get copied into thesdk-filesdirectory.The following information appears under each of the
hostandtargetdirectories for the portions of the SDK that run on the host and on the target, respectively:Note
The following files for the most part are empty when producing an extensible SDK because this type of SDK is not constructed from packages as is the standard SDK.
depends.dot:Dependency graph for the SDK that is compatible withgraphviz.installed-package-names.txt:A list of installed packages by name only.installed-package-sizes.txt:A list of installed packages ordered by size.installed-packages.txt:A list of installed packages with full package filenames.
Here is an example of sdk-info.txt:
DISTRO = poky
DISTRO_VERSION = 1.3+snapshot-20130327
SDK_NAME = poky-glibc-i686-arm
SDK_VERSION = 1.3+snapshot
SDKMACHINE =
SDKIMAGE_FEATURES = dev-pkgs dbg-pkgs
BAD_RECOMMENDATIONS =
SDKSIZE = 352712
Other than SDKSIZE, which is
the total size of the files in the SDK in Kbytes, the name-value pairs
are variables that might have influenced the content of the SDK. This
information is often useful when you are trying to determine why a
change in the package or file listings has occurred.
3.28.2.5 Examining Build History Information
You can examine build history output from the command line or from a web interface.
To see any changes that have occurred (assuming you have BUILDHISTORY_COMMIT = “1”), you can simply use any Git command that allows you to view the history of a repository. Here is one method:
$ git log -p
You need to realize, however, that this method does show changes that are not significant (e.g. a package’s size changing by a few bytes).
A command-line tool called buildhistory-diff does exist, though,
that queries the Git repository and prints just the differences that
might be significant in human-readable form. Here is an example:
$ ~/poky/poky/scripts/buildhistory-diff . HEAD^
Changes to images/qemux86_64/glibc/core-image-minimal (files-in-image.txt):
/etc/anotherpkg.conf was added
/sbin/anotherpkg was added
* (installed-package-names.txt):
* anotherpkg was added
Changes to images/qemux86_64/glibc/core-image-minimal (installed-package-names.txt):
anotherpkg was added
packages/qemux86_64-poky-linux/v86d: PACKAGES: added "v86d-extras"
* PR changed from "r0" to "r1"
* PV changed from "0.1.10" to "0.1.12"
packages/qemux86_64-poky-linux/v86d/v86d: PKGSIZE changed from 110579 to 144381 (+30%)
* PR changed from "r0" to "r1"
* PV changed from "0.1.10" to "0.1.12"
Note
The buildhistory-diff tool requires the GitPython
package. Be sure to install it using Pip3 as follows:
$ pip3 install GitPython --user
Alternatively, you can install python3-git using the appropriate
distribution package manager (e.g. apt-get, dnf, or zipper).
To see changes to the build history using a web interface, follow the
instruction in the README file
here.
Here is a sample screenshot of the interface:
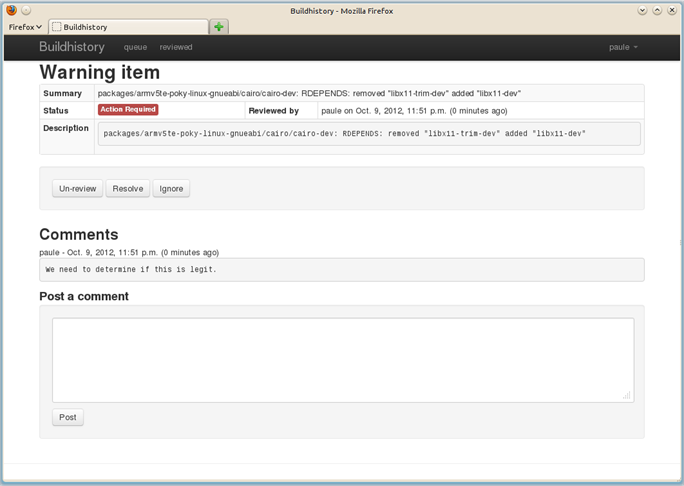
3.29 Performing Automated Runtime Testing
The OpenEmbedded build system makes available a series of automated
tests for images to verify runtime functionality. You can run these
tests on either QEMU or actual target hardware. Tests are written in
Python making use of the unittest module, and the majority of them
run commands on the target system over SSH. This section describes how
you set up the environment to use these tests, run available tests, and
write and add your own tests.
For information on the test and QA infrastructure available within the Yocto Project, see the “Testing and Quality Assurance” section in the Yocto Project Reference Manual.
3.29.1 Enabling Tests
Depending on whether you are planning to run tests using QEMU or on the hardware, you have to take different steps to enable the tests. See the following subsections for information on how to enable both types of tests.
3.29.1.1 Enabling Runtime Tests on QEMU
In order to run tests, you need to do the following:
Set up to avoid interaction with sudo for networking: To accomplish this, you must do one of the following:
Add
NOPASSWDfor your user in/etc/sudoerseither for all commands or just forrunqemu-ifup. You must provide the full path as that can change if you are using multiple clones of the source repository.Note
On some distributions, you also need to comment out “Defaults requiretty” in
/etc/sudoers.Manually configure a tap interface for your system.
Run as root the script in
scripts/runqemu-gen-tapdevs, which should generate a list of tap devices. This is the option typically chosen for Autobuilder-type environments.Note
Be sure to use an absolute path when calling this script with sudo.
The package recipe
qemu-helper-nativeis required to run this script. Build the package using the following command:$ bitbake qemu-helper-native
Set the DISPLAY variable: You need to set this variable so that you have an X server available (e.g. start
vncserverfor a headless machine).Be sure your host’s firewall accepts incoming connections from 192.168.7.0/24: Some of the tests (in particular DNF tests) start an HTTP server on a random high number port, which is used to serve files to the target. The DNF module serves
${WORKDIR}/oe-rootfs-reposo it can run DNF channel commands. That means your host’s firewall must accept incoming connections from 192.168.7.0/24, which is the default IP range used for tap devices byrunqemu.Be sure your host has the correct packages installed: Depending your host’s distribution, you need to have the following packages installed:
Ubuntu and Debian:
sysstatandiproute2OpenSUSE:
sysstatandiproute2Fedora:
sysstatandiprouteCentOS:
sysstatandiproute
Once you start running the tests, the following happens:
A copy of the root filesystem is written to
${WORKDIR}/testimage.The image is booted under QEMU using the standard
runqemuscript.A default timeout of 500 seconds occurs to allow for the boot process to reach the login prompt. You can change the timeout period by setting TEST_QEMUBOOT_TIMEOUT in the
local.conffile.Once the boot process is reached and the login prompt appears, the tests run. The full boot log is written to
${WORKDIR}/testimage/qemu_boot_log.Each test module loads in the order found in
TEST_SUITES. You can find the full output of the commands run over SSH in${WORKDIR}/testimgage/ssh_target_log.If no failures occur, the task running the tests ends successfully. You can find the output from the
unittestin the task log at${WORKDIR}/temp/log.do_testimage.
3.29.1.2 Enabling Runtime Tests on Hardware
The OpenEmbedded build system can run tests on real hardware, and for certain devices it can also deploy the image to be tested onto the device beforehand.
For automated deployment, a “master image” is installed onto the hardware once as part of setup. Then, each time tests are to be run, the following occurs:
The master image is booted into and used to write the image to be tested to a second partition.
The device is then rebooted using an external script that you need to provide.
The device boots into the image to be tested.
When running tests (independent of whether the image has been deployed automatically or not), the device is expected to be connected to a network on a pre-determined IP address. You can either use static IP addresses written into the image, or set the image to use DHCP and have your DHCP server on the test network assign a known IP address based on the MAC address of the device.
In order to run tests on hardware, you need to set TEST_TARGET to an
appropriate value. For QEMU, you do not have to change anything, the
default value is “qemu”. For running tests on hardware, the following
options exist:
“simpleremote”: Choose “simpleremote” if you are going to run tests on a target system that is already running the image to be tested and is available on the network. You can use “simpleremote” in conjunction with either real hardware or an image running within a separately started QEMU or any other virtual machine manager.
“SystemdbootTarget”: Choose “SystemdbootTarget” if your hardware is an EFI-based machine with
systemd-bootas bootloader andcore-image-testmaster(or something similar) is installed. Also, your hardware under test must be in a DHCP-enabled network that gives it the same IP address for each reboot.If you choose “SystemdbootTarget”, there are additional requirements and considerations. See the “Selecting SystemdbootTarget” section, which follows, for more information.
“BeagleBoneTarget”: Choose “BeagleBoneTarget” if you are deploying images and running tests on the BeagleBone “Black” or original “White” hardware. For information on how to use these tests, see the comments at the top of the BeagleBoneTarget
meta-yocto-bsp/lib/oeqa/controllers/beaglebonetarget.pyfile.“EdgeRouterTarget”: Choose “EdgeRouterTarget” if you are deploying images and running tests on the Ubiquiti Networks EdgeRouter Lite. For information on how to use these tests, see the comments at the top of the EdgeRouterTarget
meta-yocto-bsp/lib/oeqa/controllers/edgeroutertarget.pyfile.“GrubTarget”: Choose “GrubTarget” if you are deploying images and running tests on any generic PC that boots using GRUB. For information on how to use these tests, see the comments at the top of the GrubTarget
meta-yocto-bsp/lib/oeqa/controllers/grubtarget.pyfile.“your-target”: Create your own custom target if you want to run tests when you are deploying images and running tests on a custom machine within your BSP layer. To do this, you need to add a Python unit that defines the target class under
lib/oeqa/controllers/within your layer. You must also provide an empty__init__.py. For examples, see files inmeta-yocto-bsp/lib/oeqa/controllers/.
3.29.1.3 Selecting SystemdbootTarget
If you did not set TEST_TARGET to “SystemdbootTarget”, then you do
not need any information in this section. You can skip down to the
“Running Tests” section.
If you did set TEST_TARGET to “SystemdbootTarget”, you also need to
perform a one-time setup of your master image by doing the following:
Set EFI_PROVIDER: Be sure that
EFI_PROVIDERis as follows:EFI_PROVIDER = "systemd-boot"
Build the master image: Build the
core-image-testmasterimage. Thecore-image-testmasterrecipe is provided as an example for a “master” image and you can customize the image recipe as you would any other recipe.Here are the image recipe requirements:
Inherits
core-imageso that kernel modules are installed.Installs normal linux utilities not busybox ones (e.g.
bash,coreutils,tar,gzip, andkmod).Uses a custom Initial RAM Disk (initramfs) image with a custom installer. A normal image that you can install usually creates a single rootfs partition. This image uses another installer that creates a specific partition layout. Not all Board Support Packages (BSPs) can use an installer. For such cases, you need to manually create the following partition layout on the target:
First partition mounted under
/boot, labeled “boot”.The main rootfs partition where this image gets installed, which is mounted under
/.Another partition labeled “testrootfs” where test images get deployed.
Install image: Install the image that you just built on the target system.
The final thing you need to do when setting TEST_TARGET to
“SystemdbootTarget” is to set up the test image:
Set up your local.conf file: Make sure you have the following statements in your
local.conffile:IMAGE_FSTYPES += "tar.gz" INHERIT += "testimage" TEST_TARGET = "SystemdbootTarget" TEST_TARGET_IP = "192.168.2.3"
Build your test image: Use BitBake to build the image:
$ bitbake core-image-sato
3.29.1.4 Power Control
For most hardware targets other than “simpleremote”, you can control power:
You can use
TEST_POWERCONTROL_CMDtogether withTEST_POWERCONTROL_EXTRA_ARGSas a command that runs on the host and does power cycling. The test code passes one argument to that command: off, on or cycle (off then on). Here is an example that could appear in yourlocal.conffile:TEST_POWERCONTROL_CMD = "powercontrol.exp test 10.11.12.1 nuc1"
In this example, the expect script does the following:
ssh test@10.11.12.1 "pyctl nuc1 arg"It then runs a Python script that controls power for a label called
nuc1.Note
You need to customize
TEST_POWERCONTROL_CMDandTEST_POWERCONTROL_EXTRA_ARGSfor your own setup. The one requirement is that it accepts “on”, “off”, and “cycle” as the last argument.When no command is defined, it connects to the device over SSH and uses the classic reboot command to reboot the device. Classic reboot is fine as long as the machine actually reboots (i.e. the SSH test has not failed). It is useful for scenarios where you have a simple setup, typically with a single board, and where some manual interaction is okay from time to time.
If you have no hardware to automatically perform power control but still
wish to experiment with automated hardware testing, you can use the
dialog-power-control script that shows a dialog prompting you to perform
the required power action. This script requires either KDialog or Zenity
to be installed. To use this script, set the
TEST_POWERCONTROL_CMD
variable as follows:
TEST_POWERCONTROL_CMD = "${COREBASE}/scripts/contrib/dialog-power-control"
3.29.1.5 Serial Console Connection
For test target classes requiring a serial console to interact with the bootloader (e.g. BeagleBoneTarget, EdgeRouterTarget, and GrubTarget), you need to specify a command to use to connect to the serial console of the target machine by using the TEST_SERIALCONTROL_CMD variable and optionally the TEST_SERIALCONTROL_EXTRA_ARGS variable.
These cases could be a serial terminal program if the machine is
connected to a local serial port, or a telnet or ssh command
connecting to a remote console server. Regardless of the case, the
command simply needs to connect to the serial console and forward that
connection to standard input and output as any normal terminal program
does. For example, to use the picocom terminal program on serial device
/dev/ttyUSB0 at 115200bps, you would set the variable as follows:
TEST_SERIALCONTROL_CMD = "picocom /dev/ttyUSB0 -b 115200"
For local
devices where the serial port device disappears when the device reboots,
an additional “serdevtry” wrapper script is provided. To use this
wrapper, simply prefix the terminal command with
${COREBASE}/scripts/contrib/serdevtry:
TEST_SERIALCONTROL_CMD = "${COREBASE}/scripts/contrib/serdevtry picocom -b 115200 /dev/ttyUSB0"
3.29.2 Running Tests
You can start the tests automatically or manually:
Automatically running tests: To run the tests automatically after the OpenEmbedded build system successfully creates an image, first set the TESTIMAGE_AUTO variable to “1” in your
local.conffile in the Build Directory:TESTIMAGE_AUTO = "1"
Next, build your image. If the image successfully builds, the tests run:
bitbake core-image-sato
Manually running tests: To manually run the tests, first globally inherit the testimage class by editing your
local.conffile:INHERIT += "testimage"
Next, use BitBake to run the tests:
bitbake -c testimage image
All test files reside in meta/lib/oeqa/runtime in the
Source Directory. A test name maps
directly to a Python module. Each test module may contain a number of
individual tests. Tests are usually grouped together by the area tested
(e.g tests for systemd reside in meta/lib/oeqa/runtime/systemd.py).
You can add tests to any layer provided you place them in the proper
area and you extend BBPATH in
the local.conf file as normal. Be sure that tests reside in
layer/lib/oeqa/runtime.
Note
Be sure that module names do not collide with module names used in
the default set of test modules in meta/lib/oeqa/runtime.
You can change the set of tests run by appending or overriding
TEST_SUITES variable in
local.conf. Each name in TEST_SUITES represents a required test
for the image. Test modules named within TEST_SUITES cannot be
skipped even if a test is not suitable for an image (e.g. running the
RPM tests on an image without rpm). Appending “auto” to
TEST_SUITES causes the build system to try to run all tests that are
suitable for the image (i.e. each test module may elect to skip itself).
The order you list tests in TEST_SUITES is important and influences
test dependencies. Consequently, tests that depend on other tests should
be added after the test on which they depend. For example, since the
ssh test depends on the ping test, “ssh” needs to come after
“ping” in the list. The test class provides no re-ordering or dependency
handling.
Note
Each module can have multiple classes with multiple test methods.
And, Python unittest rules apply.
Here are some things to keep in mind when running tests:
The default tests for the image are defined as:
DEFAULT_TEST_SUITES_pn-image = "ping ssh df connman syslog xorg scp vnc date rpm dnf dmesg"
Add your own test to the list of the by using the following:
TEST_SUITES_append = " mytest"
Run a specific list of tests as follows:
TEST_SUITES = "test1 test2 test3"
Remember, order is important. Be sure to place a test that is dependent on another test later in the order.
3.29.3 Exporting Tests
You can export tests so that they can run independently of the build system. Exporting tests is required if you want to be able to hand the test execution off to a scheduler. You can only export tests that are defined in TEST_SUITES.
If your image is already built, make sure the following are set in your
local.conf file:
INHERIT += "testexport"
TEST_TARGET_IP = "IP-address-for-the-test-target"
TEST_SERVER_IP = "IP-address-for-the-test-server"
You can then export the tests with the following BitBake command form:
$ bitbake image -c testexport
Exporting the tests places them in the
Build Directory in
tmp/testexport/image, which is controlled by the
TEST_EXPORT_DIR variable.
You can now run the tests outside of the build environment:
$ cd tmp/testexport/image
$ ./runexported.py testdata.json
Here is a complete example that shows IP addresses and uses the
core-image-sato image:
INHERIT += "testexport"
TEST_TARGET_IP = "192.168.7.2"
TEST_SERVER_IP = "192.168.7.1"
Use BitBake to export the tests:
$ bitbake core-image-sato -c testexport
Run the tests outside of the build environment using the following:
$ cd tmp/testexport/core-image-sato
$ ./runexported.py testdata.json
3.29.4 Writing New Tests
As mentioned previously, all new test files need to be in the proper
place for the build system to find them. New tests for additional
functionality outside of the core should be added to the layer that adds
the functionality, in layer/lib/oeqa/runtime (as long as
BBPATH is extended in the
layer’s layer.conf file as normal). Just remember the following:
Filenames need to map directly to test (module) names.
Do not use module names that collide with existing core tests.
Minimally, an empty
__init__.pyfile must exist in the runtime directory.
To create a new test, start by copying an existing module (e.g.
syslog.py or gcc.py are good ones to use). Test modules can use
code from meta/lib/oeqa/utils, which are helper classes.
Note
Structure shell commands such that you rely on them and they return a
single code for success. Be aware that sometimes you will need to
parse the output. See the df.py and date.py modules for examples.
You will notice that all test classes inherit oeRuntimeTest, which
is found in meta/lib/oetest.py. This base class offers some helper
attributes, which are described in the following sections:
3.29.4.1 Class Methods
Class methods are as follows:
hasPackage(pkg): Returns “True” if
pkgis in the installed package list of the image, which is based on the manifest file that is generated during thedo_rootfstask.hasFeature(feature): Returns “True” if the feature is in IMAGE_FEATURES or DISTRO_FEATURES.
3.29.4.2 Class Attributes
Class attributes are as follows:
pscmd: Equals “ps -ef” if
procpsis installed in the image. Otherwise,pscmdequals “ps” (busybox).tc: The called test context, which gives access to the following attributes:
d: The BitBake datastore, which allows you to use stuff such as
oeRuntimeTest.tc.d.getVar("VIRTUAL-RUNTIME_init_manager").testslist and testsrequired: Used internally. The tests do not need these.
filesdir: The absolute path to
meta/lib/oeqa/runtime/files, which contains helper files for tests meant for copying on the target such as small files written in C for compilation.target: The target controller object used to deploy and start an image on a particular target (e.g. Qemu, SimpleRemote, and SystemdbootTarget). Tests usually use the following:
ip: The target’s IP address.
server_ip: The host’s IP address, which is usually used by the DNF test suite.
run(cmd, timeout=None): The single, most used method. This command is a wrapper for:
ssh root@host "cmd". The command returns a tuple: (status, output), which are what their names imply - the return code of “cmd” and whatever output it produces. The optional timeout argument represents the number of seconds the test should wait for “cmd” to return. If the argument is “None”, the test uses the default instance’s timeout period, which is 300 seconds. If the argument is “0”, the test runs until the command returns.copy_to(localpath, remotepath):
scp localpath root@ip:remotepath.copy_from(remotepath, localpath):
scp root@host:remotepath localpath.
3.29.4.3 Instance Attributes
A single instance attribute exists, which is target. The target
instance attribute is identical to the class attribute of the same name,
which is described in the previous section. This attribute exists as
both an instance and class attribute so tests can use
self.target.run(cmd) in instance methods instead of
oeRuntimeTest.tc.target.run(cmd).
3.29.5 Installing Packages in the DUT Without the Package Manager
When a test requires a package built by BitBake, it is possible to
install that package. Installing the package does not require a package
manager be installed in the device under test (DUT). It does, however,
require an SSH connection and the target must be using the
sshcontrol class.
Note
This method uses scp to copy files from the host to the target, which
causes permissions and special attributes to be lost.
A JSON file is used to define the packages needed by a test. This file
must be in the same path as the file used to define the tests.
Furthermore, the filename must map directly to the test module name with
a .json extension.
The JSON file must include an object with the test name as keys of an object or an array. This object (or array of objects) uses the following data:
“pkg” - A mandatory string that is the name of the package to be installed.
“rm” - An optional boolean, which defaults to “false”, that specifies to remove the package after the test.
“extract” - An optional boolean, which defaults to “false”, that specifies if the package must be extracted from the package format. When set to “true”, the package is not automatically installed into the DUT.
Following is an example JSON file that handles test “foo” installing package “bar” and test “foobar” installing packages “foo” and “bar”. Once the test is complete, the packages are removed from the DUT.
{
"foo": {
"pkg": "bar"
},
"foobar": [
{
"pkg": "foo",
"rm": true
},
{
"pkg": "bar",
"rm": true
}
]
}
3.30 Debugging Tools and Techniques
The exact method for debugging build failures depends on the nature of the problem and on the system’s area from which the bug originates. Standard debugging practices such as comparison against the last known working version with examination of the changes and the re-application of steps to identify the one causing the problem are valid for the Yocto Project just as they are for any other system. Even though it is impossible to detail every possible potential failure, this section provides some general tips to aid in debugging given a variety of situations.
Note
A useful feature for debugging is the error reporting tool. Configuring the Yocto Project to use this tool causes the OpenEmbedded build system to produce error reporting commands as part of the console output. You can enter the commands after the build completes to log error information into a common database, that can help you figure out what might be going wrong. For information on how to enable and use this feature, see the “Using the Error Reporting Tool” section.
The following list shows the debugging topics in the remainder of this section:
“Viewing Logs from Failed Tasks” describes how to find and view logs from tasks that failed during the build process.
“Viewing Variable Values” describes how to use the BitBake
-eoption to examine variable values after a recipe has been parsed.“Viewing Package Information with oe-pkgdata-util” describes how to use the
oe-pkgdata-utilutility to query PKGDATA_DIR and display package-related information for built packages.“Viewing Dependencies Between Recipes and Tasks” describes how to use the BitBake
-goption to display recipe dependency information used during the build.“Viewing Task Variable Dependencies” describes how to use the
bitbake-dumpsigcommand in conjunction with key subdirectories in the Build Directory to determine variable dependencies.“Running Specific Tasks” describes how to use several BitBake options (e.g.
-c,-C, and-f) to run specific tasks in the build chain. It can be useful to run tasks “out-of-order” when trying isolate build issues.“General BitBake Problems” describes how to use BitBake’s
-Ddebug output option to reveal more about what BitBake is doing during the build.“Building with No Dependencies” describes how to use the BitBake
-boption to build a recipe while ignoring dependencies.“Recipe Logging Mechanisms” describes how to use the many recipe logging functions to produce debugging output and report errors and warnings.
“Debugging Parallel Make Races” describes how to debug situations where the build consists of several parts that are run simultaneously and when the output or result of one part is not ready for use with a different part of the build that depends on that output.
“Debugging With the GNU Project Debugger (GDB) Remotely” describes how to use GDB to allow you to examine running programs, which can help you fix problems.
“Debugging with the GNU Project Debugger (GDB) on the Target” describes how to use GDB directly on target hardware for debugging.
“Other Debugging Tips” describes miscellaneous debugging tips that can be useful.
3.30.1 Viewing Logs from Failed Tasks
You can find the log for a task in the file
${WORKDIR}/temp/log.do_taskname.
For example, the log for the
do_compile task of the
QEMU minimal image for the x86 machine (qemux86) might be in
tmp/work/qemux86-poky-linux/core-image-minimal/1.0-r0/temp/log.do_compile.
To see the commands BitBake ran
to generate a log, look at the corresponding run.do_taskname file
in the same directory.
log.do_taskname and run.do_taskname are actually symbolic
links to log.do_taskname.pid and
log.run_taskname.pid, where pid is the PID the task had
when it ran. The symlinks always point to the files corresponding to the
most recent run.
3.30.2 Viewing Variable Values
Sometimes you need to know the value of a variable as a result of BitBake’s parsing step. This could be because some unexpected behavior occurred in your project. Perhaps an attempt to modify a variable did not work out as expected.
BitBake’s -e option is used to display variable values after
parsing. The following command displays the variable values after the
configuration files (i.e. local.conf, bblayers.conf,
bitbake.conf and so forth) have been parsed:
$ bitbake -e
The following command displays variable values after a specific recipe has been parsed. The variables include those from the configuration as well:
$ bitbake -e recipename
Note
Each recipe has its own private set of variables (datastore). Internally, after parsing the configuration, a copy of the resulting datastore is made prior to parsing each recipe. This copying implies that variables set in one recipe will not be visible to other recipes.
Likewise, each task within a recipe gets a private datastore based on the recipe datastore, which means that variables set within one task will not be visible to other tasks.
In the output of bitbake -e, each variable is preceded by a
description of how the variable got its value, including temporary
values that were later overridden. This description also includes
variable flags (varflags) set on the variable. The output can be very
helpful during debugging.
Variables that are exported to the environment are preceded by
export in the output of bitbake -e. See the following example:
export CC="i586-poky-linux-gcc -m32 -march=i586 --sysroot=/home/ulf/poky/build/tmp/sysroots/qemux86"
In addition to variable values, the output of the bitbake -e and
bitbake -e recipe commands includes the following information:
The output starts with a tree listing all configuration files and classes included globally, recursively listing the files they include or inherit in turn. Much of the behavior of the OpenEmbedded build system (including the behavior of the Normal Recipe Build Tasks) is implemented in the base class and the classes it inherits, rather than being built into BitBake itself.
After the variable values, all functions appear in the output. For shell functions, variables referenced within the function body are expanded. If a function has been modified using overrides or using override-style operators like
_appendand_prepend, then the final assembled function body appears in the output.
3.30.3 Viewing Package Information with oe-pkgdata-util
You can use the oe-pkgdata-util command-line utility to query
PKGDATA_DIR and display
various package-related information. When you use the utility, you must
use it to view information on packages that have already been built.
Following are a few of the available oe-pkgdata-util subcommands.
Note
You can use the standard * and ? globbing wildcards as part of package names and paths.
oe-pkgdata-util list-pkgs [pattern]: Lists all packages that have been built, optionally limiting the match to packages that match pattern.oe-pkgdata-util list-pkg-files package ...: Lists the files and directories contained in the given packages.Note
A different way to view the contents of a package is to look at the
${WORKDIR}/packages-splitdirectory of the recipe that generates the package. This directory is created by the do_package task and has one subdirectory for each package the recipe generates, which contains the files stored in that package.If you want to inspect the
${WORKDIR}/packages-splitdirectory, make sure that rm_work is not enabled when you build the recipe.oe-pkgdata-util find-path path ...: Lists the names of the packages that contain the given paths. For example, the following tells us that/usr/share/man/man1/make.1is contained in themake-docpackage:$ oe-pkgdata-util find-path /usr/share/man/man1/make.1 make-doc: /usr/share/man/man1/make.1
oe-pkgdata-util lookup-recipe package ...: Lists the name of the recipes that produce the given packages.
For more information on the oe-pkgdata-util command, use the help
facility:
$ oe-pkgdata-util --help
$ oe-pkgdata-util subcommand --help
3.30.4 Viewing Dependencies Between Recipes and Tasks
Sometimes it can be hard to see why BitBake wants to build other recipes before the one you have specified. Dependency information can help you understand why a recipe is built.
To generate dependency information for a recipe, run the following command:
$ bitbake -g recipename
This command writes the following files in the current directory:
pn-buildlist: A list of recipes/targets involved in building recipename. “Involved” here means that at least one task from the recipe needs to run when building recipename from scratch. Targets that are in ASSUME_PROVIDED are not listed.task-depends.dot: A graph showing dependencies between tasks.
The graphs are in
DOT
format and can be converted to images (e.g. using the dot tool from
Graphviz).
Note
DOT files use a plain text format. The graphs generated using the
bitbake -gcommand are often so large as to be difficult to read without special pruning (e.g. with Bitbake’s-Ioption) and processing. Despite the form and size of the graphs, the corresponding.dotfiles can still be possible to read and provide useful information.As an example, the
task-depends.dotfile contains lines such as the following:"libxslt.do_configure" -> "libxml2.do_populate_sysroot"
The above example line reveals that the do_configure task in
libxsltdepends on the do_populate_sysroot task inlibxml2, which is a normal DEPENDS dependency between the two recipes.For an example of how
.dotfiles can be processed, see thescripts/contrib/graph-toolPython script, which finds and displays paths between graph nodes.
You can use a different method to view dependency information by using the following command:
$ bitbake -g -u taskexp recipename
This command displays a GUI window from which you can view build-time and runtime dependencies for the recipes involved in building recipename.
3.30.5 Viewing Task Variable Dependencies
As mentioned in the
“Checksums (Signatures)” section of the BitBake
User Manual, BitBake tries to automatically determine what variables a
task depends on so that it can rerun the task if any values of the
variables change. This determination is usually reliable. However, if
you do things like construct variable names at runtime, then you might
have to manually declare dependencies on those variables using
vardeps as described in the
“Variable Flags” section of the BitBake
User Manual.
If you are unsure whether a variable dependency is being picked up automatically for a given task, you can list the variable dependencies BitBake has determined by doing the following:
1. Build the recipe containing the task:
$ bitbake recipename
Inside the STAMPS_DIR directory, find the signature data (
sigdata) file that corresponds to the task. Thesigdatafiles contain a pickled Python database of all the metadata that went into creating the input checksum for the task. As an example, for the do_fetch task of thedbrecipe, thesigdatafile might be found in the following location:${BUILDDIR}/tmp/stamps/i586-poky-linux/db/6.0.30-r1.do_fetch.sigdata.7c048c18222b16ff0bcee2000ef648b1For tasks that are accelerated through the shared state (sstate) cache, an additional
siginfofile is written into SSTATE_DIR along with the cached task output. Thesiginfofiles contain exactly the same information assigdatafiles.Run
bitbake-dumpsigon thesigdataorsiginfofile. Here is an example:$ bitbake-dumpsig ${BUILDDIR}/tmp/stamps/i586-poky-linux/db/6.0.30-r1.do_fetch.sigdata.7c048c18222b16ff0bcee2000ef648b1In the output of the above command, you will find a line like the following, which lists all the (inferred) variable dependencies for the task. This list also includes indirect dependencies from variables depending on other variables, recursively.
Task dependencies: ['PV', 'SRCREV', 'SRC_URI', 'SRC_URI[md5sum]', 'SRC_URI[sha256sum]', 'base_do_fetch']
Note
Functions (e.g.
base_do_fetch) also count as variable dependencies. These functions in turn depend on the variables they reference.The output of
bitbake-dumpsigalso includes the value each variable had, a list of dependencies for each variable, and BB_HASHBASE_WHITELIST information.
There is also a bitbake-diffsigs command for comparing two
siginfo or sigdata files. This command can be helpful when
trying to figure out what changed between two versions of a task. If you
call bitbake-diffsigs with just one file, the command behaves like
bitbake-dumpsig.
You can also use BitBake to dump out the signature construction information without executing tasks by using either of the following BitBake command-line options:
‐‐dump-signatures=SIGNATURE_HANDLER
-S SIGNATURE_HANDLER
Note
Two common values for SIGNATURE_HANDLER are “none” and “printdiff”, which dump only the signature or compare the dumped signature with the cached one, respectively.
Using BitBake with either of these options causes BitBake to dump out
sigdata files in the stamps directory for every task it would
have executed instead of building the specified target package.
3.30.8 Running Specific Tasks
Any given recipe consists of a set of tasks. The standard BitBake
behavior in most cases is: do_fetch, do_unpack, do_patch,
do_configure, do_compile, do_install, do_package,
do_package_write_*, and do_build. The default task is
do_build and any tasks on which it depends build first. Some tasks,
such as do_devshell, are not part of the default build chain. If you
wish to run a task that is not part of the default build chain, you can
use the -c option in BitBake. Here is an example:
$ bitbake matchbox-desktop -c devshell
The -c option respects task dependencies, which means that all other
tasks (including tasks from other recipes) that the specified task
depends on will be run before the task. Even when you manually specify a
task to run with -c, BitBake will only run the task if it considers
it “out of date”. See the
“Stamp Files and the Rerunning of Tasks”
section in the Yocto Project Overview and Concepts Manual for how
BitBake determines whether a task is “out of date”.
If you want to force an up-to-date task to be rerun (e.g. because you
made manual modifications to the recipe’s
WORKDIR that you want to try
out), then you can use the -f option.
Note
The reason -f is never required when running the
do_devshell task is because the
[nostamp]
variable flag is already set for the task.
The following example shows one way you can use the -f option:
$ bitbake matchbox-desktop
.
.
make some changes to the source code in the work directory
.
.
$ bitbake matchbox-desktop -c compile -f
$ bitbake matchbox-desktop
This sequence first builds and then recompiles matchbox-desktop. The
last command reruns all tasks (basically the packaging tasks) after the
compile. BitBake recognizes that the do_compile task was rerun and
therefore understands that the other tasks also need to be run again.
Another, shorter way to rerun a task and all
Normal Recipe Build Tasks
that depend on it is to use the -C option.
Note
This option is upper-cased and is separate from the -c
option, which is lower-cased.
Using this option invalidates the given task and then runs the do_build task, which is the default task if no task is given, and the tasks on which it depends. You could replace the final two commands in the previous example with the following single command:
$ bitbake matchbox-desktop -C compile
Internally, the -f and -C options work by tainting (modifying)
the input checksum of the specified task. This tainting indirectly
causes the task and its dependent tasks to be rerun through the normal
task dependency mechanisms.
Note
BitBake explicitly keeps track of which tasks have been tainted in this fashion, and will print warnings such as the following for builds involving such tasks:
WARNING: /home/ulf/poky/meta/recipes-sato/matchbox-desktop/matchbox-desktop_2.1.bb.do_compile is tainted from a forced run
The purpose of the warning is to let you know that the work directory and build output might not be in the clean state they would be in for a “normal” build, depending on what actions you took. To get rid of such warnings, you can remove the work directory and rebuild the recipe, as follows:
$ bitbake matchbox-desktop -c clean
$ bitbake matchbox-desktop
You can view a list of tasks in a given package by running the
do_listtasks task as follows:
$ bitbake matchbox-desktop -c listtasks
The results appear as output to the console and are also in
the file ${WORKDIR}/temp/log.do_listtasks.
3.30.9 General BitBake Problems
You can see debug output from BitBake by using the -D option. The
debug output gives more information about what BitBake is doing and the
reason behind it. Each -D option you use increases the logging
level. The most common usage is -DDD.
The output from bitbake -DDD -v targetname can reveal why BitBake
chose a certain version of a package or why BitBake picked a certain
provider. This command could also help you in a situation where you
think BitBake did something unexpected.
3.30.10 Building with No Dependencies
To build a specific recipe (.bb file), you can use the following
command form:
$ bitbake -b somepath/somerecipe.bb
This command form does not check for dependencies. Consequently, you should use it only when you know existing dependencies have been met.
Note
You can also specify fragments of the filename. In this case, BitBake checks for a unique match.
3.30.11 Recipe Logging Mechanisms
The Yocto Project provides several logging functions for producing
debugging output and reporting errors and warnings. For Python
functions, the following logging functions exist. All of these functions
log to ${T}/log.do_task, and can also log to standard output
(stdout) with the right settings:
bb.plain(msg): Writes msg as is to the log while also logging to stdout.bb.note(msg): Writes “NOTE: msg” to the log. Also logs to stdout if BitBake is called with “-v”.bb.debug(level, msg): Writes “DEBUG: msg” to the log. Also logs to stdout if the log level is greater than or equal to level. See the “-D” option in the BitBake User Manual for more information.bb.warn(msg): Writes “WARNING: msg” to the log while also logging to stdout.bb.error(msg): Writes “ERROR: msg” to the log while also logging to standard out (stdout).Note
Calling this function does not cause the task to fail.
bb.fatal(msg): This logging function is similar tobb.error(msg)but also causes the calling task to fail.Note
bb.fatal()raises an exception, which means you do not need to put a “return” statement after the function.
The same logging functions are also available in shell functions, under
the names bbplain, bbnote, bbdebug, bbwarn, bberror,
and bbfatal. The
logging class
implements these functions. See that class in the meta/classes
folder of the Source Directory for information.
3.30.11.1 Logging With Python
When creating recipes using Python and inserting code that handles build logs, keep in mind the goal is to have informative logs while keeping the console as “silent” as possible. Also, if you want status messages in the log, use the “debug” loglevel.
Following is an example written in Python. The code handles logging for a function that determines the number of tasks needed to be run. See the “do_listtasks” section for additional information:
python do_listtasks() {
bb.debug(2, "Starting to figure out the task list")
if noteworthy_condition:
bb.note("There are 47 tasks to run")
bb.debug(2, "Got to point xyz")
if warning_trigger:
bb.warn("Detected warning_trigger, this might be a problem later.")
if recoverable_error:
bb.error("Hit recoverable_error, you really need to fix this!")
if fatal_error:
bb.fatal("fatal_error detected, unable to print the task list")
bb.plain("The tasks present are abc")
bb.debug(2, "Finished figuring out the tasklist")
}
3.30.11.2 Logging With Bash
When creating recipes using Bash and inserting code that handles build logs, you have the same goals - informative with minimal console output. The syntax you use for recipes written in Bash is similar to that of recipes written in Python described in the previous section.
Following is an example written in Bash. The code logs the progress of
the do_my_function function.
do_my_function() {
bbdebug 2 "Running do_my_function"
if [ exceptional_condition ]; then
bbnote "Hit exceptional_condition"
fi
bbdebug 2 "Got to point xyz"
if [ warning_trigger ]; then
bbwarn "Detected warning_trigger, this might cause a problem later."
fi
if [ recoverable_error ]; then
bberror "Hit recoverable_error, correcting"
fi
if [ fatal_error ]; then
bbfatal "fatal_error detected"
fi
bbdebug 2 "Completed do_my_function"
}
3.30.12 Debugging Parallel Make Races
A parallel make race occurs when the build consists of several parts
that are run simultaneously and a situation occurs when the output or
result of one part is not ready for use with a different part of the
build that depends on that output. Parallel make races are annoying and
can sometimes be difficult to reproduce and fix. However, some simple
tips and tricks exist that can help you debug and fix them. This section
presents a real-world example of an error encountered on the Yocto
Project autobuilder and the process used to fix it.
Note
If you cannot properly fix a make race condition, you can work around it
by clearing either the PARALLEL_MAKE or PARALLEL_MAKEINST
variables.
3.30.12.1 The Failure
For this example, assume that you are building an image that depends on the “neard” package. And, during the build, BitBake runs into problems and creates the following output.
Note
This example log file has longer lines artificially broken to make the listing easier to read.
If you examine the output or the log file, you see the failure during
make:
| DEBUG: SITE files ['endian-little', 'bit-32', 'ix86-common', 'common-linux', 'common-glibc', 'i586-linux', 'common']
| DEBUG: Executing shell function do_compile
| NOTE: make -j 16
| make --no-print-directory all-am
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/types.h include/near/types.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/log.h include/near/log.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/plugin.h include/near/plugin.h
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/tag.h include/near/tag.h
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/adapter.h include/near/adapter.h
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/ndef.h include/near/ndef.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/tlv.h include/near/tlv.h
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/setting.h include/near/setting.h
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| /bin/mkdir -p include/near
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/device.h include/near/device.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/nfc_copy.h include/near/nfc_copy.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/snep.h include/near/snep.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/version.h include/near/version.h
| ln -s /home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/work/i586-poky-linux/neard/
0.14-r0/neard-0.14/include/dbus.h include/near/dbus.h
| ./src/genbuiltin nfctype1 nfctype2 nfctype3 nfctype4 p2p > src/builtin.h
| i586-poky-linux-gcc -m32 -march=i586 --sysroot=/home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/
build/build/tmp/sysroots/qemux86 -DHAVE_CONFIG_H -I. -I./include -I./src -I./gdbus -I/home/pokybuild/
yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/sysroots/qemux86/usr/include/glib-2.0
-I/home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/tmp/sysroots/qemux86/usr/
lib/glib-2.0/include -I/home/pokybuild/yocto-autobuilder/yocto-slave/nightly-x86/build/build/
tmp/sysroots/qemux86/usr/include/dbus-1.0 -I/home/pokybuild/yocto-autobuilder/yocto-slave/
nightly-x86/build/build/tmp/sysroots/qemux86/usr/lib/dbus-1.0/include -I/home/pokybuild/yocto-autobuilder/
yocto-slave/nightly-x86/build/build/tmp/sysroots/qemux86/usr/include/libnl3
-DNEAR_PLUGIN_BUILTIN -DPLUGINDIR=\""/usr/lib/near/plugins"\"
-DCONFIGDIR=\""/etc/neard\"" -O2 -pipe -g -feliminate-unused-debug-types -c
-o tools/snep-send.o tools/snep-send.c
| In file included from tools/snep-send.c:16:0:
| tools/../src/near.h:41:23: fatal error: near/dbus.h: No such file or directory
| #include <near/dbus.h>
| ^
| compilation terminated.
| make[1]: *** [tools/snep-send.o] Error 1
| make[1]: *** Waiting for unfinished jobs....
| make: *** [all] Error 2
| ERROR: oe_runmake failed
3.30.12.2 Reproducing the Error
Because race conditions are intermittent, they do not manifest themselves every time you do the build. In fact, most times the build will complete without problems even though the potential race condition exists. Thus, once the error surfaces, you need a way to reproduce it.
In this example, compiling the “neard” package is causing the problem.
So the first thing to do is build “neard” locally. Before you start the
build, set the
PARALLEL_MAKE variable
in your local.conf file to a high number (e.g. “-j 20”). Using a
high value for PARALLEL_MAKE increases the chances of the race
condition showing up:
$ bitbake neard
Once the local build for “neard” completes, start a devshell build:
$ bitbake neard -c devshell
For information on how to use a
devshell, see the “Using a Development
Shell” section.
In the devshell, do the following:
$ make clean
$ make tools/snep-send.o
The devshell commands cause the failure to clearly
be visible. In this case, a missing dependency exists for the “neard”
Makefile target. Here is some abbreviated, sample output with the
missing dependency clearly visible at the end:
i586-poky-linux-gcc -m32 -march=i586 --sysroot=/home/scott-lenovo/......
.
.
.
tools/snep-send.c
In file included from tools/snep-send.c:16:0:
tools/../src/near.h:41:23: fatal error: near/dbus.h: No such file or directory
#include <near/dbus.h>
^
compilation terminated.
make: *** [tools/snep-send.o] Error 1
$
3.30.12.3 Creating a Patch for the Fix
Because there is a missing dependency for the Makefile target, you need
to patch the Makefile.am file, which is generated from
Makefile.in. You can use Quilt to create the patch:
$ quilt new parallelmake.patch
Patch patches/parallelmake.patch is now on top
$ quilt add Makefile.am
File Makefile.am added to patch patches/parallelmake.patch
For more information on using Quilt, see the “Using Quilt in Your Workflow” section.
At this point you need to make the edits to Makefile.am to add the
missing dependency. For our example, you have to add the following line
to the file:
tools/snep-send.$(OBJEXT): include/near/dbus.h
Once you have edited the file, use the refresh command to create the
patch:
$ quilt refresh
Refreshed patch patches/parallelmake.patch
Once
the patch file exists, you need to add it back to the originating recipe
folder. Here is an example assuming a top-level
Source Directory named poky:
$ cp patches/parallelmake.patch poky/meta/recipes-connectivity/neard/neard
The final thing you need to do to implement the fix in the build is to
update the “neard” recipe (i.e. neard-0.14.bb) so that the
SRC_URI statement includes
the patch file. The recipe file is in the folder above the patch. Here
is what the edited SRC_URI statement would look like:
SRC_URI = "${KERNELORG_MIRROR}/linux/network/nfc/${BPN}-${PV}.tar.xz \
file://neard.in \
file://neard.service.in \
file://parallelmake.patch \
"
With the patch complete and moved to the correct folder and the
SRC_URI statement updated, you can exit the devshell:
$ exit
3.30.12.4 Testing the Build
With everything in place, you can get back to trying the build again locally:
$ bitbake neard
This build should succeed.
Now you can open up a devshell again and repeat the clean and make
operations as follows:
$ bitbake neard -c devshell
$ make clean
$ make tools/snep-send.o
The build should work without issue.
As with all solved problems, if they originated upstream, you need to submit the fix for the recipe in OE-Core and upstream so that the problem is taken care of at its source. See the “Submitting a Change to the Yocto Project” section for more information.
3.30.13 Debugging With the GNU Project Debugger (GDB) Remotely
GDB allows you to examine running programs, which in turn helps you to understand and fix problems. It also allows you to perform post-mortem style analysis of program crashes. GDB is available as a package within the Yocto Project and is installed in SDK images by default. See the “Images” chapter in the Yocto Project Reference Manual for a description of these images. You can find information on GDB at https://sourceware.org/gdb/.
Note
For best results, install debug (-dbg) packages for the applications you
are going to debug. Doing so makes extra debug symbols available that give
you more meaningful output.
Sometimes, due to memory or disk space constraints, it is not possible to use GDB directly on the remote target to debug applications. These constraints arise because GDB needs to load the debugging information and the binaries of the process being debugged. Additionally, GDB needs to perform many computations to locate information such as function names, variable names and values, stack traces and so forth - even before starting the debugging process. These extra computations place more load on the target system and can alter the characteristics of the program being debugged.
To help get past the previously mentioned constraints, you can use gdbserver, which runs on the remote target and does not load any debugging information from the debugged process. Instead, a GDB instance processes the debugging information that is run on a remote computer - the host GDB. The host GDB then sends control commands to gdbserver to make it stop or start the debugged program, as well as read or write memory regions of that debugged program. All the debugging information loaded and processed as well as all the heavy debugging is done by the host GDB. Offloading these processes gives the gdbserver running on the target a chance to remain small and fast.
Because the host GDB is responsible for loading the debugging information and for doing the necessary processing to make actual debugging happen, you have to make sure the host can access the unstripped binaries complete with their debugging information and also be sure the target is compiled with no optimizations. The host GDB must also have local access to all the libraries used by the debugged program. Because gdbserver does not need any local debugging information, the binaries on the remote target can remain stripped. However, the binaries must also be compiled without optimization so they match the host’s binaries.
To remain consistent with GDB documentation and terminology, the binary being debugged on the remote target machine is referred to as the “inferior” binary. For documentation on GDB see the GDB site.
The following steps show you how to debug using the GNU project debugger.
Configure your build system to construct the companion debug filesystem:
In your
local.conffile, set the following:IMAGE_GEN_DEBUGFS = "1" IMAGE_FSTYPES_DEBUGFS = "tar.bz2"
These options cause the OpenEmbedded build system to generate a special companion filesystem fragment, which contains the matching source and debug symbols to your deployable filesystem. The build system does this by looking at what is in the deployed filesystem, and pulling the corresponding
-dbgpackages.The companion debug filesystem is not a complete filesystem, but only contains the debug fragments. This filesystem must be combined with the full filesystem for debugging. Subsequent steps in this procedure show how to combine the partial filesystem with the full filesystem.
Configure the system to include gdbserver in the target filesystem:
Make the following addition in either your
local.conffile or in an image recipe:IMAGE_INSTALL_append = " gdbserver"
The change makes sure the
gdbserverpackage is included.Build the environment:
Use the following command to construct the image and the companion Debug Filesystem:
$ bitbake image
Build the cross GDB component and make it available for debugging. Build the SDK that matches the image. Building the SDK is best for a production build that can be used later for debugging, especially during long term maintenance:
$ bitbake -c populate_sdk image
Alternatively, you can build the minimal toolchain components that match the target. Doing so creates a smaller than typical SDK and only contains a minimal set of components with which to build simple test applications, as well as run the debugger:
$ bitbake meta-toolchain
A final method is to build Gdb itself within the build system:
$ bitbake gdb-cross-<architecture>
Doing so produces a temporary copy of
cross-gdbyou can use for debugging during development. While this is the quickest approach, the two previous methods in this step are better when considering long-term maintenance strategies.Note
If you run
bitbake gdb-cross, the OpenEmbedded build system suggests the actual image (e.g.gdb-cross-i586). The suggestion is usually the actual name you want to use.Set up the
debugfs:Run the following commands to set up the
debugfs:$ mkdir debugfs $ cd debugfs $ tar xvfj build-dir/tmp-glibc/deploy/images/machine/image.rootfs.tar.bz2 $ tar xvfj build-dir/tmp-glibc/deploy/images/machine/image-dbg.rootfs.tar.bz2
Set up GDB:
Install the SDK (if you built one) and then source the correct environment file. Sourcing the environment file puts the SDK in your
PATHenvironment variable.If you are using the build system, Gdb is located in build-dir
/tmp/sysroots/host/usr/bin/architecture/architecture-gdbBoot the target:
For information on how to run QEMU, see the QEMU Documentation.
Note
Be sure to verify that your host can access the target via TCP.
Debug a program:
Debugging a program involves running gdbserver on the target and then running Gdb on the host. The example in this step debugs
gzip:root@qemux86:~# gdbserver localhost:1234 /bin/gzip —help
For additional gdbserver options, see the GDB Server Documentation.
After running gdbserver on the target, you need to run Gdb on the host and configure it and connect to the target. Use these commands:
$ cd directory-holding-the-debugfs-directory $ arch-gdb (gdb) set sysroot debugfs (gdb) set substitute-path /usr/src/debug debugfs/usr/src/debug (gdb) target remote IP-of-target:1234
At this point, everything should automatically load (i.e. matching binaries, symbols and headers).
Note
The Gdb
setcommands in the previous example can be placed into the users~/.gdbinitfile. Upon starting, Gdb automatically runs whatever commands are in that file.Deploying without a full image rebuild:
In many cases, during development you want a quick method to deploy a new binary to the target and debug it, without waiting for a full image build.
One approach to solving this situation is to just build the component you want to debug. Once you have built the component, copy the executable directly to both the target and the host
debugfs.If the binary is processed through the debug splitting in OpenEmbedded, you should also copy the debug items (i.e.
.debugcontents and corresponding/usr/src/debugfiles) from the work directory. Here is an example:$ bitbake bash $ bitbake -c devshell bash $ cd .. $ scp packages-split/bash/bin/bash target:/bin/bash $ cp -a packages-split/bash-dbg/\* path/debugfs
3.30.14 Debugging with the GNU Project Debugger (GDB) on the Target
The previous section addressed using GDB remotely for debugging purposes, which is the most usual case due to the inherent hardware limitations on many embedded devices. However, debugging in the target hardware itself is also possible with more powerful devices. This section describes what you need to do in order to support using GDB to debug on the target hardware.
To support this kind of debugging, you need do the following:
Ensure that GDB is on the target. You can do this by adding “gdb” to IMAGE_INSTALL:
IMAGE_INSTALL_append = " gdb"
Alternatively, you can add “tools-debug” to IMAGE_FEATURES:
IMAGE_FEATURES_append = " tools-debug"
Ensure that debug symbols are present. You can make sure these symbols are present by installing
-dbg:IMAGE_INSTALL_append = "packagename-dbg"
Alternatively, you can do the following to include all the debug symbols:
IMAGE_FEATURES_append = " dbg-pkgs"
Note
To improve the debug information accuracy, you can reduce the level
of optimization used by the compiler. For example, when adding the
following line to your local.conf file, you will reduce optimization
from FULL_OPTIMIZATION of “-O2” to DEBUG_OPTIMIZATION
of “-O -fno-omit-frame-pointer”:
DEBUG_BUILD = "1"
Consider that this will reduce the application’s performance and is recommended only for debugging purposes.
3.30.15 Other Debugging Tips
Here are some other tips that you might find useful:
When adding new packages, it is worth watching for undesirable items making their way into compiler command lines. For example, you do not want references to local system files like
/usr/lib/or/usr/include/.If you want to remove the
psplashboot splashscreen, addpsplash=falseto the kernel command line. Doing so preventspsplashfrom loading and thus allows you to see the console. It is also possible to switch out of the splashscreen by switching the virtual console (e.g. Fn+Left or Fn+Right on a Zaurus).Removing TMPDIR (usually
tmp/, within the Build Directory) can often fix temporary build issues. RemovingTMPDIRis usually a relatively cheap operation, because task output will be cached in SSTATE_DIR (usuallysstate-cache/, which is also in the Build Directory).Note
Removing
TMPDIRmight be a workaround rather than a fix. Consequently, trying to determine the underlying cause of an issue before removing the directory is a good idea.Understanding how a feature is used in practice within existing recipes can be very helpful. It is recommended that you configure some method that allows you to quickly search through files.
Using GNU Grep, you can use the following shell function to recursively search through common recipe-related files, skipping binary files,
.gitdirectories, and the Build Directory (assuming its name starts with “build”):g() { grep -Ir \ --exclude-dir=.git \ --exclude-dir='build*' \ --include='*.bb*' \ --include='*.inc*' \ --include='*.conf*' \ --include='*.py*' \ "$@" }
Following are some usage examples:
$ g FOO # Search recursively for "FOO" $ g -i foo # Search recursively for "foo", ignoring case $ g -w FOO # Search recursively for "FOO" as a word, ignoring e.g. "FOOBAR"
If figuring out how some feature works requires a lot of searching, it might indicate that the documentation should be extended or improved. In such cases, consider filing a documentation bug using the Yocto Project implementation of Bugzilla. For information on how to submit a bug against the Yocto Project, see the Yocto Project Bugzilla wiki page and the “Submitting a Defect Against the Yocto Project” section.
Note
The manuals might not be the right place to document variables that are purely internal and have a limited scope (e.g. internal variables used to implement a single
.bbclassfile).
3.31 Making Changes to the Yocto Project
Because the Yocto Project is an open-source, community-based project, you can effect changes to the project. This section presents procedures that show you how to submit a defect against the project and how to submit a change.
3.31.1 Submitting a Defect Against the Yocto Project
Use the Yocto Project implementation of Bugzilla to submit a defect (bug) against the Yocto Project. For additional information on this implementation of Bugzilla see the “Yocto Project Bugzilla” section in the Yocto Project Reference Manual. For more detail on any of the following steps, see the Yocto Project Bugzilla wiki page.
Use the following general steps to submit a bug:
Open the Yocto Project implementation of Bugzilla.
Click “File a Bug” to enter a new bug.
Choose the appropriate “Classification”, “Product”, and “Component” for which the bug was found. Bugs for the Yocto Project fall into one of several classifications, which in turn break down into several products and components. For example, for a bug against the
meta-intellayer, you would choose “Build System, Metadata & Runtime”, “BSPs”, and “bsps-meta-intel”, respectively.Choose the “Version” of the Yocto Project for which you found the bug (e.g. 3.1.5).
Determine and select the “Severity” of the bug. The severity indicates how the bug impacted your work.
Choose the “Hardware” that the bug impacts.
Choose the “Architecture” that the bug impacts.
Choose a “Documentation change” item for the bug. Fixing a bug might or might not affect the Yocto Project documentation. If you are unsure of the impact to the documentation, select “Don’t Know”.
Provide a brief “Summary” of the bug. Try to limit your summary to just a line or two and be sure to capture the essence of the bug.
Provide a detailed “Description” of the bug. You should provide as much detail as you can about the context, behavior, output, and so forth that surrounds the bug. You can even attach supporting files for output from logs by using the “Add an attachment” button.
Click the “Submit Bug” button submit the bug. A new Bugzilla number is assigned to the bug and the defect is logged in the bug tracking system.
Once you file a bug, the bug is processed by the Yocto Project Bug Triage Team and further details concerning the bug are assigned (e.g. priority and owner). You are the “Submitter” of the bug and any further categorization, progress, or comments on the bug result in Bugzilla sending you an automated email concerning the particular change or progress to the bug.
3.31.2 Submitting a Change to the Yocto Project
Contributions to the Yocto Project and OpenEmbedded are very welcome. Because the system is extremely configurable and flexible, we recognize that developers will want to extend, configure or optimize it for their specific uses.
The Yocto Project uses a mailing list and a patch-based workflow that is
similar to the Linux kernel but contains important differences. In
general, a mailing list exists through which you can submit patches. You
should send patches to the appropriate mailing list so that they can be
reviewed and merged by the appropriate maintainer. The specific mailing
list you need to use depends on the location of the code you are
changing. Each component (e.g. layer) should have a README file that
indicates where to send the changes and which process to follow.
You can send the patch to the mailing list using whichever approach you feel comfortable with to generate the patch. Once sent, the patch is usually reviewed by the community at large. If somebody has concerns with the patch, they will usually voice their concern over the mailing list. If a patch does not receive any negative reviews, the maintainer of the affected layer typically takes the patch, tests it, and then based on successful testing, merges the patch.
The “poky” repository, which is the Yocto Project’s reference build environment, is a hybrid repository that contains several individual pieces (e.g. BitBake, Metadata, documentation, and so forth) built using the combo-layer tool. The upstream location used for submitting changes varies by component:
Core Metadata: Send your patch to the openembedded-core mailing list. For example, a change to anything under the
metaorscriptsdirectories should be sent to this mailing list.BitBake: For changes to BitBake (i.e. anything under the
bitbakedirectory), send your patch to the bitbake-devel mailing list.“meta-*” trees: These trees contain Metadata. Use the poky mailing list.
Documentation: For changes to the Yocto Project documentation, use the docs mailing list.
For changes to other layers hosted in the Yocto Project source
repositories (i.e. yoctoproject.org) and tools use the
Yocto Project general mailing list.
Note
Sometimes a layer’s documentation specifies to use a particular mailing list. If so, use that list.
For additional recipes that do not fit into the core Metadata, you
should determine which layer the recipe should go into and submit the
change in the manner recommended by the documentation (e.g. the
README file) supplied with the layer. If in doubt, please ask on the
Yocto general mailing list or on the openembedded-devel mailing list.
You can also push a change upstream and request a maintainer to pull the change into the component’s upstream repository. You do this by pushing to a contribution repository that is upstream. See the “Git Workflows and the Yocto Project” section in the Yocto Project Overview and Concepts Manual for additional concepts on working in the Yocto Project development environment.
Two commonly used testing repositories exist for OpenEmbedded-Core:
“ross/mut” branch: The “mut” (master-under-test) tree exists in the
poky-contribrepository in the Yocto Project source repositories.“master-next” branch: This branch is part of the main “poky” repository in the Yocto Project source repositories.
Maintainers use these branches to test submissions prior to merging patches. Thus, you can get an idea of the status of a patch based on whether the patch has been merged into one of these branches.
Note
This system is imperfect and changes can sometimes get lost in the flow. Asking about the status of a patch or change is reasonable if the change has been idle for a while with no feedback. The Yocto Project does have plans to use Patchwork to track the status of patches and also to automatically preview patches.
The following sections provide procedures for submitting a change.
3.31.2.1 Using Scripts to Push a Change Upstream and Request a Pull
Follow this procedure to push a change to an upstream “contrib” Git repository:
Note
You can find general Git information on how to push a change upstream in the Git Community Book.
Make Your Changes Locally: Make your changes in your local Git repository. You should make small, controlled, isolated changes. Keeping changes small and isolated aids review, makes merging/rebasing easier and keeps the change history clean should anyone need to refer to it in future.
Stage Your Changes: Stage your changes by using the
git addcommand on each file you changed.Commit Your Changes: Commit the change by using the
git commitcommand. Make sure your commit information follows standards by following these accepted conventions:Be sure to include a “Signed-off-by:” line in the same style as required by the Linux kernel. Adding this line signifies that you, the submitter, have agreed to the Developer’s Certificate of Origin 1.1 as follows:
Developer's Certificate of Origin 1.1 By making a contribution to this project, I certify that: (a) The contribution was created in whole or in part by me and I have the right to submit it under the open source license indicated in the file; or (b) The contribution is based upon previous work that, to the best of my knowledge, is covered under an appropriate open source license and I have the right under that license to submit that work with modifications, whether created in whole or in part by me, under the same open source license (unless I am permitted to submit under a different license), as indicated in the file; or (c) The contribution was provided directly to me by some other person who certified (a), (b) or (c) and I have not modified it. (d) I understand and agree that this project and the contribution are public and that a record of the contribution (including all personal information I submit with it, including my sign-off) is maintained indefinitely and may be redistributed consistent with this project or the open source license(s) involved.Provide a single-line summary of the change and, if more explanation is needed, provide more detail in the body of the commit. This summary is typically viewable in the “shortlist” of changes. Thus, providing something short and descriptive that gives the reader a summary of the change is useful when viewing a list of many commits. You should prefix this short description with the recipe name (if changing a recipe), or else with the short form path to the file being changed.
For the body of the commit message, provide detailed information that describes what you changed, why you made the change, and the approach you used. It might also be helpful if you mention how you tested the change. Provide as much detail as you can in the body of the commit message.
Note
You do not need to provide a more detailed explanation of a change if the change is minor to the point of the single line summary providing all the information.
If the change addresses a specific bug or issue that is associated with a bug-tracking ID, include a reference to that ID in your detailed description. For example, the Yocto Project uses a specific convention for bug references - any commit that addresses a specific bug should use the following form for the detailed description. Be sure to use the actual bug-tracking ID from Bugzilla for bug-id:
Fixes [YOCTO #bug-id] detailed description of change
Push Your Commits to a “Contrib” Upstream: If you have arranged for permissions to push to an upstream contrib repository, push the change to that repository:
$ git push upstream_remote_repo local_branch_name
For example, suppose you have permissions to push into the upstream
meta-intel-contribrepository and you are working in a local branch named your_name/README. The following command pushes your local commits to themeta-intel-contribupstream repository and puts the commit in a branch named your_name/README:$ git push meta-intel-contrib your_name/README
Determine Who to Notify: Determine the maintainer or the mailing list that you need to notify for the change.
Before submitting any change, you need to be sure who the maintainer is or what mailing list that you need to notify. Use either these methods to find out:
Maintenance File: Examine the
maintainers.incfile, which is located in the Source Directory atmeta/conf/distro/include, to see who is responsible for code.Search by File: Using Git, you can enter the following command to bring up a short list of all commits against a specific file:
git shortlog -- filename
Just provide the name of the file for which you are interested. The information returned is not ordered by history but does include a list of everyone who has committed grouped by name. From the list, you can see who is responsible for the bulk of the changes against the file.
Examine the List of Mailing Lists: For a list of the Yocto Project and related mailing lists, see the “Mailing lists” section in the Yocto Project Reference Manual.
Make a Pull Request: Notify the maintainer or the mailing list that you have pushed a change by making a pull request.
The Yocto Project provides two scripts that conveniently let you generate and send pull requests to the Yocto Project. These scripts are
create-pull-requestandsend-pull-request. You can find these scripts in thescriptsdirectory within the Source Directory (e.g.~/poky/scripts).Using these scripts correctly formats the requests without introducing any whitespace or HTML formatting. The maintainer that receives your patches either directly or through the mailing list needs to be able to save and apply them directly from your emails. Using these scripts is the preferred method for sending patches.
First, create the pull request. For example, the following command runs the script, specifies the upstream repository in the contrib directory into which you pushed the change, and provides a subject line in the created patch files:
$ ~/poky/scripts/create-pull-request -u meta-intel-contrib -s "Updated Manual Section Reference in README"
Running this script forms
*.patchfiles in a folder namedpull-PID in the current directory. One of the patch files is a cover letter.Before running the
send-pull-requestscript, you must edit the cover letter patch to insert information about your change. After editing the cover letter, send the pull request. For example, the following command runs the script and specifies the patch directory and email address. In this example, the email address is a mailing list:$ ~/poky/scripts/send-pull-request -p ~/meta-intel/pull-10565 -t meta-intel@yoctoproject.org
You need to follow the prompts as the script is interactive.
Note
For help on using these scripts, simply provide the
-hargument as follows:$ poky/scripts/create-pull-request -h $ poky/scripts/send-pull-request -h
3.31.2.2 Using Email to Submit a Patch
You can submit patches without using the create-pull-request and
send-pull-request scripts described in the previous section.
However, keep in mind, the preferred method is to use the scripts.
Depending on the components changed, you need to submit the email to a specific mailing list. For some guidance on which mailing list to use, see the list at the beginning of this section. For a description of all the available mailing lists, see the “Mailing Lists” section in the Yocto Project Reference Manual.
Here is the general procedure on how to submit a patch through email without using the scripts:
Make Your Changes Locally: Make your changes in your local Git repository. You should make small, controlled, isolated changes. Keeping changes small and isolated aids review, makes merging/rebasing easier and keeps the change history clean should anyone need to refer to it in future.
Stage Your Changes: Stage your changes by using the
git addcommand on each file you changed.Commit Your Changes: Commit the change by using the
git commit --signoffcommand. Using the--signoffoption identifies you as the person making the change and also satisfies the Developer’s Certificate of Origin (DCO) shown earlier.When you form a commit, you must follow certain standards established by the Yocto Project development team. See Step 3 in the previous section for information on how to provide commit information that meets Yocto Project commit message standards.
Format the Commit: Format the commit into an email message. To format commits, use the
git format-patchcommand. When you provide the command, you must include a revision list or a number of patches as part of the command. For example, either of these two commands takes your most recent single commit and formats it as an email message in the current directory:$ git format-patch -1
or
$ git format-patch HEAD~
After the command is run, the current directory contains a numbered
.patchfile for the commit.If you provide several commits as part of the command, the
git format-patchcommand produces a series of numbered files in the current directory – one for each commit. If you have more than one patch, you should also use the--coveroption with the command, which generates a cover letter as the first “patch” in the series. You can then edit the cover letter to provide a description for the series of patches. For information on thegit format-patchcommand, seeGIT_FORMAT_PATCH(1)displayed using theman git-format-patchcommand.Note
If you are or will be a frequent contributor to the Yocto Project or to OpenEmbedded, you might consider requesting a contrib area and the necessary associated rights.
Import the Files Into Your Mail Client: Import the files into your mail client by using the
git send-emailcommand.Note
In order to use
git send-email, you must have the proper Git packages installed on your host. For Ubuntu, Debian, and Fedora the package isgit-email.The
git send-emailcommand sends email by using a local or remote Mail Transport Agent (MTA) such asmsmtp,sendmail, or through a directsmtpconfiguration in your Git~/.gitconfigfile. If you are submitting patches through email only, it is very important that you submit them without any whitespace or HTML formatting that either you or your mailer introduces. The maintainer that receives your patches needs to be able to save and apply them directly from your emails. A good way to verify that what you are sending will be applicable by the maintainer is to do a dry run and send them to yourself and then save and apply them as the maintainer would.The
git send-emailcommand is the preferred method for sending your patches using email since there is no risk of compromising whitespace in the body of the message, which can occur when you use your own mail client. The command also has several options that let you specify recipients and perform further editing of the email message. For information on how to use thegit send-emailcommand, seeGIT-SEND-EMAIL(1)displayed using theman git-send-emailcommand.
3.32 Working With Licenses
As mentioned in the “Licensing” section in the Yocto Project Overview and Concepts Manual, open source projects are open to the public and they consequently have different licensing structures in place. This section describes the mechanism by which the OpenEmbedded Build System tracks changes to licensing text and covers how to maintain open source license compliance during your project’s lifecycle. The section also describes how to enable commercially licensed recipes, which by default are disabled.
3.32.1 Tracking License Changes
The license of an upstream project might change in the future. In order to prevent these changes going unnoticed, the LIC_FILES_CHKSUM variable tracks changes to the license text. The checksums are validated at the end of the configure step, and if the checksums do not match, the build will fail.
3.32.1.1 Specifying the LIC_FILES_CHKSUM Variable
The LIC_FILES_CHKSUM variable contains checksums of the license text
in the source code for the recipe. Following is an example of how to
specify LIC_FILES_CHKSUM:
LIC_FILES_CHKSUM = "file://COPYING;md5=xxxx \
file://licfile1.txt;beginline=5;endline=29;md5=yyyy \
file://licfile2.txt;endline=50;md5=zzzz \
..."
Note
When using “beginline” and “endline”, realize that line numbering begins with one and not zero. Also, the included lines are inclusive (i.e. lines five through and including 29 in the previous example for
licfile1.txt).When a license check fails, the selected license text is included as part of the QA message. Using this output, you can determine the exact start and finish for the needed license text.
The build system uses the S
variable as the default directory when searching files listed in
LIC_FILES_CHKSUM. The previous example employs the default
directory.
Consider this next example:
LIC_FILES_CHKSUM = "file://src/ls.c;beginline=5;endline=16;\
md5=bb14ed3c4cda583abc85401304b5cd4e"
LIC_FILES_CHKSUM = "file://${WORKDIR}/license.html;md5=5c94767cedb5d6987c902ac850ded2c6"
The first line locates a file in ${S}/src/ls.c and isolates lines
five through 16 as license text. The second line refers to a file in
WORKDIR.
Note that LIC_FILES_CHKSUM variable is mandatory for all recipes,
unless the LICENSE variable is set to “CLOSED”.
3.32.1.2 Explanation of Syntax
As mentioned in the previous section, the LIC_FILES_CHKSUM variable
lists all the important files that contain the license text for the
source code. It is possible to specify a checksum for an entire file, or
a specific section of a file (specified by beginning and ending line
numbers with the “beginline” and “endline” parameters, respectively).
The latter is useful for source files with a license notice header,
README documents, and so forth. If you do not use the “beginline”
parameter, then it is assumed that the text begins on the first line of
the file. Similarly, if you do not use the “endline” parameter, it is
assumed that the license text ends with the last line of the file.
The “md5” parameter stores the md5 checksum of the license text. If the license text changes in any way as compared to this parameter then a mismatch occurs. This mismatch triggers a build failure and notifies the developer. Notification allows the developer to review and address the license text changes. Also note that if a mismatch occurs during the build, the correct md5 checksum is placed in the build log and can be easily copied to the recipe.
There is no limit to how many files you can specify using the
LIC_FILES_CHKSUM variable. Generally, however, every project
requires a few specifications for license tracking. Many projects have a
“COPYING” file that stores the license information for all the source
code files. This practice allows you to just track the “COPYING” file as
long as it is kept up to date.
Note
If you specify an empty or invalid “md5” parameter, BitBake returns an md5 mis-match error and displays the correct “md5” parameter value during the build. The correct parameter is also captured in the build log.
If the whole file contains only license text, you do not need to use the “beginline” and “endline” parameters.
3.32.2 Enabling Commercially Licensed Recipes
By default, the OpenEmbedded build system disables components that have
commercial or other special licensing requirements. Such requirements
are defined on a recipe-by-recipe basis through the
LICENSE_FLAGS variable
definition in the affected recipe. For instance, the
poky/meta/recipes-multimedia/gstreamer/gst-plugins-ugly recipe
contains the following statement:
LICENSE_FLAGS = "commercial"
Here is a slightly more complicated example that contains both an explicit recipe name and version (after variable expansion):
LICENSE_FLAGS = "license_${PN}_${PV}"
In order for a component restricted by a
LICENSE_FLAGS definition to be enabled and included in an image, it
needs to have a matching entry in the global
LICENSE_FLAGS_WHITELIST
variable, which is a variable typically defined in your local.conf
file. For example, to enable the
poky/meta/recipes-multimedia/gstreamer/gst-plugins-ugly package, you
could add either the string “commercial_gst-plugins-ugly” or the more
general string “commercial” to LICENSE_FLAGS_WHITELIST. See the
“License Flag Matching” section for a full
explanation of how LICENSE_FLAGS matching works. Here is the
example:
LICENSE_FLAGS_WHITELIST = "commercial_gst-plugins-ugly"
Likewise, to additionally enable the package built from the recipe
containing LICENSE_FLAGS = "license_${PN}_${PV}", and assuming that
the actual recipe name was emgd_1.10.bb, the following string would
enable that package as well as the original gst-plugins-ugly
package:
LICENSE_FLAGS_WHITELIST = "commercial_gst-plugins-ugly license_emgd_1.10"
As a convenience, you do not need to specify the complete license string in the whitelist for every package. You can use an abbreviated form, which consists of just the first portion or portions of the license string before the initial underscore character or characters. A partial string will match any license that contains the given string as the first portion of its license. For example, the following whitelist string will also match both of the packages previously mentioned as well as any other packages that have licenses starting with “commercial” or “license”.
LICENSE_FLAGS_WHITELIST = "commercial license"
3.32.2.1 License Flag Matching
License flag matching allows you to control what recipes the
OpenEmbedded build system includes in the build. Fundamentally, the
build system attempts to match LICENSE_FLAGS strings found in
recipes against LICENSE_FLAGS_WHITELIST strings found in the
whitelist. A match causes the build system to include a recipe in the
build, while failure to find a match causes the build system to exclude
a recipe.
In general, license flag matching is simple. However, understanding some concepts will help you correctly and effectively use matching.
Before a flag defined by a particular recipe is tested against the
contents of the whitelist, the expanded string _${PN} is appended to
the flag. This expansion makes each LICENSE_FLAGS value
recipe-specific. After expansion, the string is then matched against the
whitelist. Thus, specifying LICENSE_FLAGS = "commercial" in recipe
“foo”, for example, results in the string "commercial_foo". And, to
create a match, that string must appear in the whitelist.
Judicious use of the LICENSE_FLAGS strings and the contents of the
LICENSE_FLAGS_WHITELIST variable allows you a lot of flexibility for
including or excluding recipes based on licensing. For example, you can
broaden the matching capabilities by using license flags string subsets
in the whitelist.
Note
When using a string subset, be sure to use the part of the expanded
string that precedes the appended underscore character (e.g.
usethispart_1.3, usethispart_1.4, and so forth).
For example, simply specifying the string “commercial” in the whitelist
matches any expanded LICENSE_FLAGS definition that starts with the
string “commercial” such as “commercial_foo” and “commercial_bar”, which
are the strings the build system automatically generates for
hypothetical recipes named “foo” and “bar” assuming those recipes simply
specify the following:
LICENSE_FLAGS = "commercial"
Thus, you can choose to exhaustively enumerate each license flag in the whitelist and allow only specific recipes into the image, or you can use a string subset that causes a broader range of matches to allow a range of recipes into the image.
This scheme works even if the LICENSE_FLAGS string already has
_${PN} appended. For example, the build system turns the license
flag “commercial_1.2_foo” into “commercial_1.2_foo_foo” and would match
both the general “commercial” and the specific “commercial_1.2_foo”
strings found in the whitelist, as expected.
Here are some other scenarios:
You can specify a versioned string in the recipe such as “commercial_foo_1.2” in a “foo” recipe. The build system expands this string to “commercial_foo_1.2_foo”. Combine this license flag with a whitelist that has the string “commercial” and you match the flag along with any other flag that starts with the string “commercial”.
Under the same circumstances, you can use “commercial_foo” in the whitelist and the build system not only matches “commercial_foo_1.2” but also matches any license flag with the string “commercial_foo”, regardless of the version.
You can be very specific and use both the package and version parts in the whitelist (e.g. “commercial_foo_1.2”) to specifically match a versioned recipe.
3.32.3 Maintaining Open Source License Compliance During Your Product’s Lifecycle
One of the concerns for a development organization using open source software is how to maintain compliance with various open source licensing during the lifecycle of the product. While this section does not provide legal advice or comprehensively cover all scenarios, it does present methods that you can use to assist you in meeting the compliance requirements during a software release.
With hundreds of different open source licenses that the Yocto Project tracks, it is difficult to know the requirements of each and every license. However, the requirements of the major FLOSS licenses can begin to be covered by assuming that three main areas of concern exist:
Source code must be provided.
License text for the software must be provided.
Compilation scripts and modifications to the source code must be provided.
There are other requirements beyond the scope of these three and the methods described in this section (e.g. the mechanism through which source code is distributed).
As different organizations have different methods of complying with open source licensing, this section is not meant to imply that there is only one single way to meet your compliance obligations, but rather to describe one method of achieving compliance. The remainder of this section describes methods supported to meet the previously mentioned three requirements. Once you take steps to meet these requirements, and prior to releasing images, sources, and the build system, you should audit all artifacts to ensure completeness.
Note
The Yocto Project generates a license manifest during image creation
that is located in ${DEPLOY_DIR}/licenses/image_name-datestamp
to assist with any audits.
3.32.3.1 Providing the Source Code
Compliance activities should begin before you generate the final image. The first thing you should look at is the requirement that tops the list for most compliance groups - providing the source. The Yocto Project has a few ways of meeting this requirement.
One of the easiest ways to meet this requirement is to provide the entire DL_DIR used by the build. This method, however, has a few issues. The most obvious is the size of the directory since it includes all sources used in the build and not just the source used in the released image. It will include toolchain source, and other artifacts, which you would not generally release. However, the more serious issue for most companies is accidental release of proprietary software. The Yocto Project provides an archiver class to help avoid some of these concerns.
Before you employ DL_DIR or the archiver class, you need to
decide how you choose to provide source. The source archiver class
can generate tarballs and SRPMs and can create them with various levels
of compliance in mind.
One way of doing this (but certainly not the only way) is to release
just the source as a tarball. You can do this by adding the following to
the local.conf file found in the
Build Directory:
INHERIT += "archiver"
ARCHIVER_MODE[src] = "original"
During the creation of your
image, the source from all recipes that deploy packages to the image is
placed within subdirectories of DEPLOY_DIR/sources based on the
LICENSE for each recipe.
Releasing the entire directory enables you to comply with requirements
concerning providing the unmodified source. It is important to note that
the size of the directory can get large.
A way to help mitigate the size issue is to only release tarballs for licenses that require the release of source. Let us assume you are only concerned with GPL code as identified by running the following script:
# Script to archive a subset of packages matching specific license(s)
# Source and license files are copied into sub folders of package folder
# Must be run from build folder
#!/bin/bash
src_release_dir="source-release"
mkdir -p $src_release_dir
for a in tmp/deploy/sources/*; do
for d in $a/*; do
# Get package name from path
p=`basename $d`
p=${p%-*}
p=${p%-*}
# Only archive GPL packages (update *GPL* regex for your license check)
numfiles=`ls tmp/deploy/licenses/$p/*GPL* 2> /dev/null | wc -l`
if [ $numfiles -gt 1 ]; then
echo Archiving $p
mkdir -p $src_release_dir/$p/source
cp $d/* $src_release_dir/$p/source 2> /dev/null
mkdir -p $src_release_dir/$p/license
cp tmp/deploy/licenses/$p/* $src_release_dir/$p/license 2> /dev/null
fi
done
done
At this point, you
could create a tarball from the gpl_source_release directory and
provide that to the end user. This method would be a step toward
achieving compliance with section 3a of GPLv2 and with section 6 of
GPLv3.
3.32.3.2 Providing License Text
One requirement that is often overlooked is inclusion of license text.
This requirement also needs to be dealt with prior to generating the
final image. Some licenses require the license text to accompany the
binary. You can achieve this by adding the following to your
local.conf file:
COPY_LIC_MANIFEST = "1"
COPY_LIC_DIRS = "1"
LICENSE_CREATE_PACKAGE = "1"
Adding these statements to the configuration file ensures that the licenses collected during package generation are included on your image.
Note
Setting all three variables to “1” results in the image having two
copies of the same license file. One copy resides in
/usr/share/common-licenses and the other resides in
/usr/share/license.
The reason for this behavior is because COPY_LIC_DIRS and COPY_LIC_MANIFEST add a copy of the license when the image is built but do not offer a path for adding licenses for newly installed packages to an image. LICENSE_CREATE_PACKAGE adds a separate package and an upgrade path for adding licenses to an image.
As the source archiver class has already archived the original
unmodified source that contains the license files, you would have
already met the requirements for inclusion of the license information
with source as defined by the GPL and other open source licenses.
3.32.3.3 Providing Compilation Scripts and Source Code Modifications
At this point, we have addressed all we need to prior to generating the image. The next two requirements are addressed during the final packaging of the release.
By releasing the version of the OpenEmbedded build system and the layers used during the build, you will be providing both compilation scripts and the source code modifications in one step.
If the deployment team has a BSP Layer and a distro layer, and those those layers are used to patch, compile, package, or modify (in any way) any open source software included in your released images, you might be required to release those layers under section 3 of GPLv2 or section 1 of GPLv3. One way of doing that is with a clean checkout of the version of the Yocto Project and layers used during your build. Here is an example:
# We built using the dunfell branch of the poky repo
$ git clone -b dunfell git://git.yoctoproject.org/poky
$ cd poky
# We built using the release_branch for our layers
$ git clone -b release_branch git://git.mycompany.com/meta-my-bsp-layer
$ git clone -b release_branch git://git.mycompany.com/meta-my-software-layer
# clean up the .git repos
$ find . -name ".git" -type d -exec rm -rf {} \;
One
thing a development organization might want to consider for end-user
convenience is to modify meta-poky/conf/bblayers.conf.sample to
ensure that when the end user utilizes the released build system to
build an image, the development organization’s layers are included in
the bblayers.conf file automatically:
# POKY_BBLAYERS_CONF_VERSION is increased each time build/conf/bblayers.conf
# changes incompatibly
POKY_BBLAYERS_CONF_VERSION = "2"
BBPATH = "${TOPDIR}"
BBFILES ?= ""
BBLAYERS ?= " \
##OEROOT##/meta \
##OEROOT##/meta-poky \
##OEROOT##/meta-yocto-bsp \
##OEROOT##/meta-mylayer \
"
Creating and providing an archive of the Metadata layers (recipes, configuration files, and so forth) enables you to meet your requirements to include the scripts to control compilation as well as any modifications to the original source.
3.32.4 Copying Licenses that Do Not Exist
Some packages, such as the linux-firmware package, have many licenses that are not in any way common. You can avoid adding a lot of these types of common license files, which are only applicable to a specific package, by using the NO_GENERIC_LICENSE variable. Using this variable also avoids QA errors when you use a non-common, non-CLOSED license in a recipe.
The following is an example that uses the LICENSE.Abilis.txt file as
the license from the fetched source:
NO_GENERIC_LICENSE[Firmware-Abilis] = "LICENSE.Abilis.txt"
3.33 Using the Error Reporting Tool
The error reporting tool allows you to submit errors encountered during
builds to a central database. Outside of the build environment, you can
use a web interface to browse errors, view statistics, and query for
errors. The tool works using a client-server system where the client
portion is integrated with the installed Yocto Project
Source Directory (e.g. poky).
The server receives the information collected and saves it in a
database.
A live instance of the error reporting server exists at https://errors.yoctoproject.org. This server exists so that when you want to get help with build failures, you can submit all of the information on the failure easily and then point to the URL in your bug report or send an email to the mailing list.
Note
If you send error reports to this server, the reports become publicly visible.
3.33.1 Enabling and Using the Tool
By default, the error reporting tool is disabled. You can enable it by
inheriting the
report-error
class by adding the following statement to the end of your
local.conf file in your
Build Directory.
INHERIT += "report-error"
By default, the error reporting feature stores information in
${LOG_DIR}/error-report.
However, you can specify a directory to use by adding the following to
your local.conf file:
ERR_REPORT_DIR = "path"
Enabling error reporting causes the build process to collect the errors and store them in a file as previously described. When the build system encounters an error, it includes a command as part of the console output. You can run the command to send the error file to the server. For example, the following command sends the errors to an upstream server:
$ send-error-report /home/brandusa/project/poky/build/tmp/log/error-report/error_report_201403141617.txt
In the previous example, the errors are sent to a public database available at https://errors.yoctoproject.org, which is used by the entire community. If you specify a particular server, you can send the errors to a different database. Use the following command for more information on available options:
$ send-error-report --help
When sending the error file, you are prompted to review the data being sent as well as to provide a name and optional email address. Once you satisfy these prompts, the command returns a link from the server that corresponds to your entry in the database. For example, here is a typical link: https://errors.yoctoproject.org/Errors/Details/9522/
Following the link takes you to a web interface where you can browse, query the errors, and view statistics.
3.33.2 Disabling the Tool
To disable the error reporting feature, simply remove or comment out the
following statement from the end of your local.conf file in your
Build Directory.
INHERIT += "report-error"
3.33.3 Setting Up Your Own Error Reporting Server
If you want to set up your own error reporting server, you can obtain the code from the Git repository at https://git.yoctoproject.org/cgit/cgit.cgi/error-report-web/. Instructions on how to set it up are in the README document.
3.34 Using Wayland and Weston
Wayland is a computer display server protocol that provides a method for compositing window managers to communicate directly with applications and video hardware and expects them to communicate with input hardware using other libraries. Using Wayland with supporting targets can result in better control over graphics frame rendering than an application might otherwise achieve.
The Yocto Project provides the Wayland protocol libraries and the
reference
Weston
compositor as part of its release. You can find the integrated packages
in the meta layer of the Source Directory.
Specifically, you
can find the recipes that build both Wayland and Weston at
meta/recipes-graphics/wayland.
You can build both the Wayland and Weston packages for use only with targets that accept the Mesa 3D and Direct Rendering Infrastructure, which is also known as Mesa DRI. This implies that you cannot build and use the packages if your target uses, for example, the Intel Embedded Media and Graphics Driver (Intel EMGD) that overrides Mesa DRI.
Note
Due to lack of EGL support, Weston 1.0.3 will not run directly on the emulated QEMU hardware. However, this version of Weston will run under X emulation without issues.
This section describes what you need to do to implement Wayland and use the Weston compositor when building an image for a supporting target.
3.34.1 Enabling Wayland in an Image
To enable Wayland, you need to enable it to be built and enable it to be included (installed) in the image.
3.34.1.1 Building Wayland
To cause Mesa to build the wayland-egl platform and Weston to build
Wayland with Kernel Mode Setting
(KMS)
support, include the “wayland” flag in the
DISTRO_FEATURES
statement in your local.conf file:
DISTRO_FEATURES_append = " wayland"
Note
If X11 has been enabled elsewhere, Weston will build Wayland with X11 support
3.34.1.2 Installing Wayland and Weston
To install the Wayland feature into an image, you must include the
following
CORE_IMAGE_EXTRA_INSTALL
statement in your local.conf file:
CORE_IMAGE_EXTRA_INSTALL += "wayland weston"
3.34.2 Running Weston
To run Weston inside X11, enabling it as described earlier and building a Sato image is sufficient. If you are running your image under Sato, a Weston Launcher appears in the “Utility” category.
Alternatively, you can run Weston through the command-line interpretor (CLI), which is better suited for development work. To run Weston under the CLI, you need to do the following after your image is built:
Run these commands to export
XDG_RUNTIME_DIR:mkdir -p /tmp/$USER-weston chmod 0700 /tmp/$USER-weston export XDG_RUNTIME_DIR=/tmp/$USER-weston
Launch Weston in the shell:
weston